
beforecontenttitle
Infraestructuras
Después del título del contenido
Antes del cuerpo del contenido
Trozos html editables
Trozos html editables
 | Stäubli RX 60Brazo robot industrial de 6 grados de libertad que le permiten realizar movimientos esféricos a cualquier posición y orientación del espacio. Su controlador funciona con corriente de tipo trifásica. Tiene una velocidad cartesiana máxima de 1.8 m/s y una precisión por repetitividad de 0.02 mm. Su capacidad de carga nominal es de 2.5 kg y su programación es a través del lenguaje licenciado por Staubli VAL. |
 | Sensable Phantom DesktopDispositivo háptico que permite controlar un sistema como un brazo robot en posición y orientación, con la particularidad de que se puede realimentar una señal de fuerzas en los tres ejes cartesianos para percibir acciones de forma remota. La precisión de la posición del dispositivo es de 0.023 mm mientras que su fuerza de trabajo nominal es de unos 8 N. El Phantom Desktop incluye una librería de programación en C con la cual se pueden portar los programas a cualquier otro entorno de desarrollo compatible. |
 | Mitsubishi PA-10 7CERobot industrial de 7 grados de libertad que permiten alcanzar cualquier posición y orientación con multitud de configuraciones articulares. Tiene un alcance de 1370 mm y una capacidad de carga máxima de 10 kg. El controlador se conecta a una tarjeta PCI a través de un cable de fibra óptica, con un muestreo de 1 ms. Para su programación, el robot incluye una librería en lenguaje C con la cual se pueden portar los programas a cualquier otro entorno de desarrollo compatible. |
 | NDI Polaris SpectraEste dispositivo permite medir tanto la posición como la orientación de unas marcas especiales que se encuentren dentro de su espacio de trabajo. Para ello, emite una señal infrarroja a un refresco máximo de 60 Hz y capta su reflejo en las marcas que se colocan en el instrumental quirúrgico. El máximo error de precisión en la medida es de 0.6 mm, aunque si la ubicación de las marcas no se encuentra en el límite del campo de visión este valor suele situarse en torno a 0.35 mm.El sensor puede ser programado a través de puerto serie gracias a que el controlador de USB emula su comportamiento, por lo es posible utilizar casi cualquier lenguaje del mercado (C/C++, Matlab, …). |
 | Sistema de laparoscopiaEl sistema de laparoscopia disponible en nuestras instalaciones incluye una torre de laparoscopia con monitor de quirófano, sistema generador de luz fría y cámara. Por otro lado, el sistema incluye un dispositivo de alimentación y activación del bisturí eléctrico, el cual es accionado a través de pedales. Por último, el sistema lo completa un simulador de paciente en el que se pueden introducir tejidos u órganos simulados para realizar experimentos in-vitro. |
 | CAE LaparoscopyVREste simulador de laparoscopia permite simular condiciones reales de diversas intervenciones quirúrgicas para cirugía mínimamente invasiva. Para ello, se recrea un entorno virtual en el que el cirujano puede interactuar a través de unos dispositivos hápticos que emulan tanto el instrumental como la cámara laparoscópica. El sistema recopila la información de toda la intervención para posteriormente presentar una evaluación tanto de la efectividad con la que el cirujano ha realizado la intervención como el tiempo empleado. |
 | Barret WAMEl brazo WAM dispone de 7 grados de libertad y es un manipulador muy preciso, de una gran flexibilidad y ligereza. Es el único brazo con capacidad direct-drive, lo que proporciona un control de fuerzas muy robusto. El brazo integra el Puck (tecnología punta en control de motores de precisión), patentado como un servoamplificador de altas prestaciones para motores sin escobillas, completamente auto-contenido y con fuentes de alimentación integradas. La tecnología servo-electrónica es extremadamente pequeña (43 gramos) y energéticamente muy eficiente. Por ejemplo, un brazo WAM entero de cuatro grados de libertad, consume tan solo 28 vatios (insuficiente para encender una bombilla), lo que mejora la seguridad inherente. |
 | Robotnik Modular ArmBrazo robot de bajo consumo (24 V), con 6 grados de libertad pertenecientes a la empresa Schünk. Los motores se conectan a través de un puerto CAN a una velocidad de refresco de 1 ms. El alcance máximo del brazo es de 1300 mm y su capacidad de carga máxima es de 9 kg. La programación de los motores se realiza a través de una librería DLL proporcionada por Schünk, pero la integración de la cinemática y el control dinámico no están incluidos. |
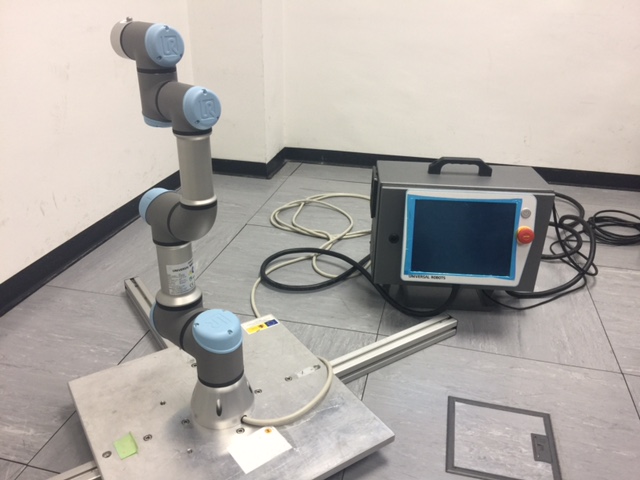 | Universal Robots UR3Brazo robot diseñado para trabajar codo con codo junto a operarios humanos en fábrica. Este manipulador de reducidas dimensiones dispone de 6 grados de libertad, una carga nominal de 3 kg y un alcance máximo de tan solo 500 mm, entorno en el cual puede desplazarse consumiendo unos 100W de potencia nominal. Su tamaño lo hace apto para tareas enfocadas en una zona de trabajo limitada. Su característica más diferenciadora respecto a la competencia (además de su tamaño) consiste en permitir un giro infinito de la última articulación. Esta habilidad le confiere de unas capacidades únicas de cara a la manipulación de herramientas laparoscópicas de forma remota, al poder orientar el extremo distal sin restricciones mecánicas. El robot dispone de una caja de control manejable mediante pistola de programación con pantalla táctil, aunque también puede accederse al estado del robot así como mandar órdenes de control a través de cable ethernet. La caja de control también dispone de 16 E/S digitales y 2 E/S analógicas, mientras que el efector final se dispone de un conector capaz de transmitir alimentación (hasta 600 mA) y 2 señales de E/S digitales. |
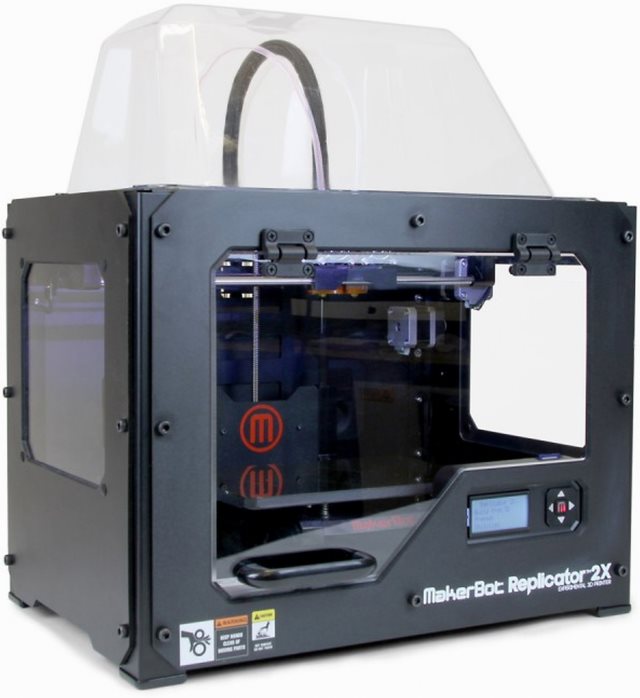 | Makerbot Replicator 2XImpresora 3D mediante el uso de filamento de ABS con resolución de 0.1 mm dedicada a la creación de piezas de prototipado rápido modeladas mediante software 3D especializado. Su doble extrusor permite el uso de dos materiales de diferente color o tipo, pudiendo combinarlos para la impresión de piezas complejas. |

Después del cuerpo del contenido

