Líneas de Investigación
La investigación del equipo de Robótica Médica se centra en el desarrollo de asistentes robóticos para cirugía laparoscópica. El objetivo se define como la creación de máquinas que no sustituyan al cirujano durante una intervención, sino que trabajen con él codo con codo. La metodología de trabajo se fundamenta en una primera etapa de creación de nuevos conocimientos, seguida de una segunda de construcción de equipos demostradores. Los prototipos desarrollados tienen una doble utilidad: resultan útiles para verificar experimentalmente los desarrollos teóricos; y facilitan la transferencia de los resultados de la investigación.
Estas líneas de investigación conllevan una serie de habilidades adquiridas por el equipo de Robótica Médica de la Universidad de Málaga. La clasificación de estas habilidades así como el nivel adquirido se detallan para cada proyecto basándose en el documento desarrollado por el grupo SPARC titulado Robotics 2020 Multi-Annual Roadmap for Robotics in Europe. El equipo de Robótica Médica continúa desarrollando y mejorando el nivel de estas habilidades gracias a su actividad en los proyectos de investigación en los que está involucrado en la actualidad.
Diseño de Robots Quirúrgicos
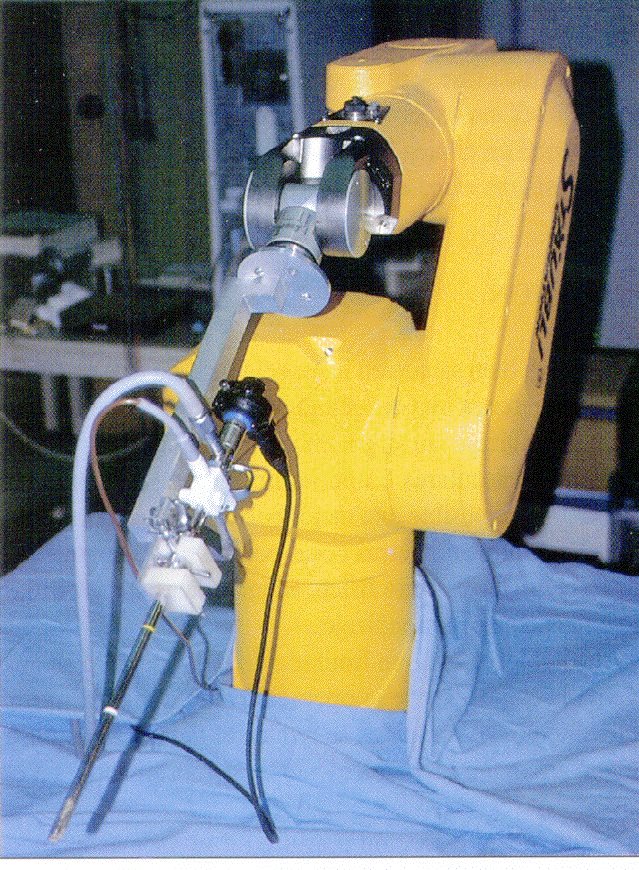
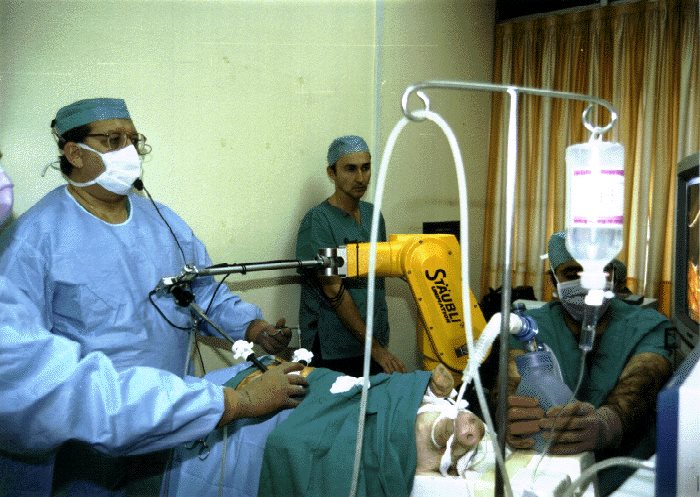 | ISA (Intelligent Surgery Assistant)Primer asistente robótico desarrollado para cirugía laparoscópica y basado en un robot industrial Staubli RX60. Los principios que tiene que cumplir es que sea capaz de acceder a todo el campo de trabajo con el endoscopio a la vez que no restrinja la libertad de movimientos del cirujano. El asistente se gobierna con órdenes verbales del cirujano, y en la fotografía situada a la izquierda se reproduce uno de los ensayos con animales de experimentación. Fue desarrollado en el marco del proyecto FIS-00/0050-02. |
 | ERM (Edoscope Robotics Manipulator)Asistente robótico desarrollado en el marco del proyecto PI021708. Diseñado para cumplir con los requisitos cinemáticos utilizados para el asistente ISA, a los que se añadieron las necesidades reales de un quirófano humano. En este sentido se incidió en que no fuese necesaria ninguna modificación estructural del quirófano para la utilización del robot y que no coartase la libertad de movimientos de ningún miembro del equipo quirúrgico. En la fotografía izquierda se muestra la versión 1.0 de ERM. |
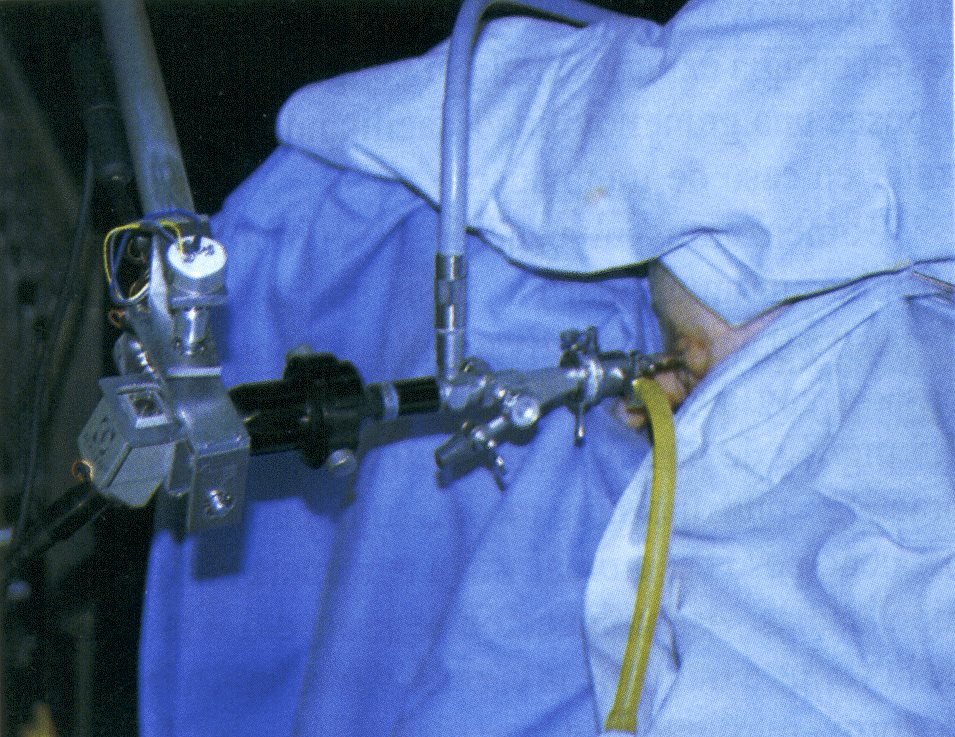
 | RTUP (Resección Trans-Uretral de la Próstata)La fotografía de la izquierda muestra la adaptación del robot ISA para la resección transutetral de la próstata. En este tipo de intervención, se introduce el resector, unido al efector final del robot, por el pene del paciente hasta llegar a la próstata. El robot se gobierna a través de un manipulador maestro. |
 | CISOBOTConsiste en un robot de dos brazos, uno dedicado a sostener la cámara laparoscópica y el otro para asistir de forma activa al cirujano durante la intervención de forma semiautónoma. El objetivo del sistema CISOBOT consiste en ayudar al cirujano a realizar una intervención en solitario. Para ello, se ha dotado al sistema de un HMI multimodal que permite al robot contar con una capacidad de reacción superior y un alto nivel de inteligencia. Dicho asistente robótico ha sido desarrollado en el marco de los proyectos DPI2007-62257 y P07-TEP-02897. |
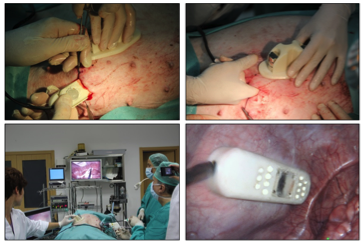
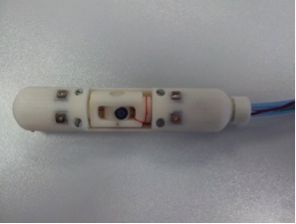 | Robots MiniaturizadosSe han diseñado una serie de robots miniaturizados que se introducen en la cavidad abdominal a través de una de las incisiones que realiza el cirujano para operar. Dichos dispositivos incorporan un imán en su interior para su sujeción a la pared abdominal. Se han diseñado dos tipos de dispositivos: un mini-robot cámara, que incorpora tanto una cámara de alta definición como un sistema de iluminación, y un mini-robot iluminación, que únicamente incorpora un sistema de iluminación y que permite dirigir la fuente de luz con el objeto de crear sombras en la imagen. |
Control de Movimientos del Instrumental
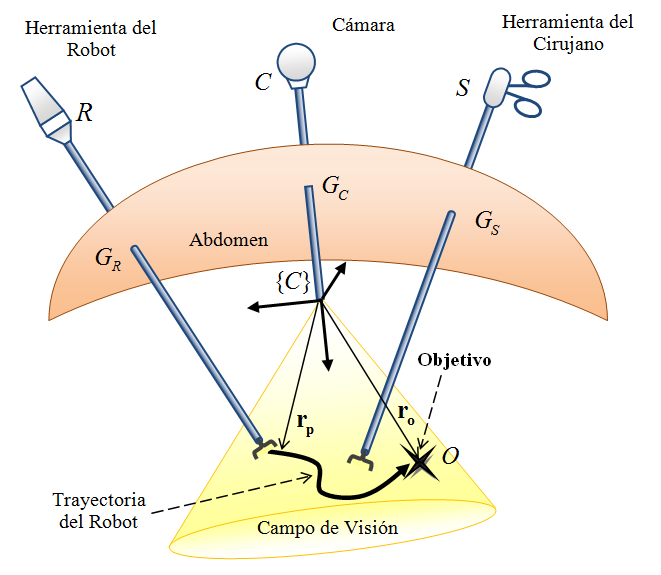
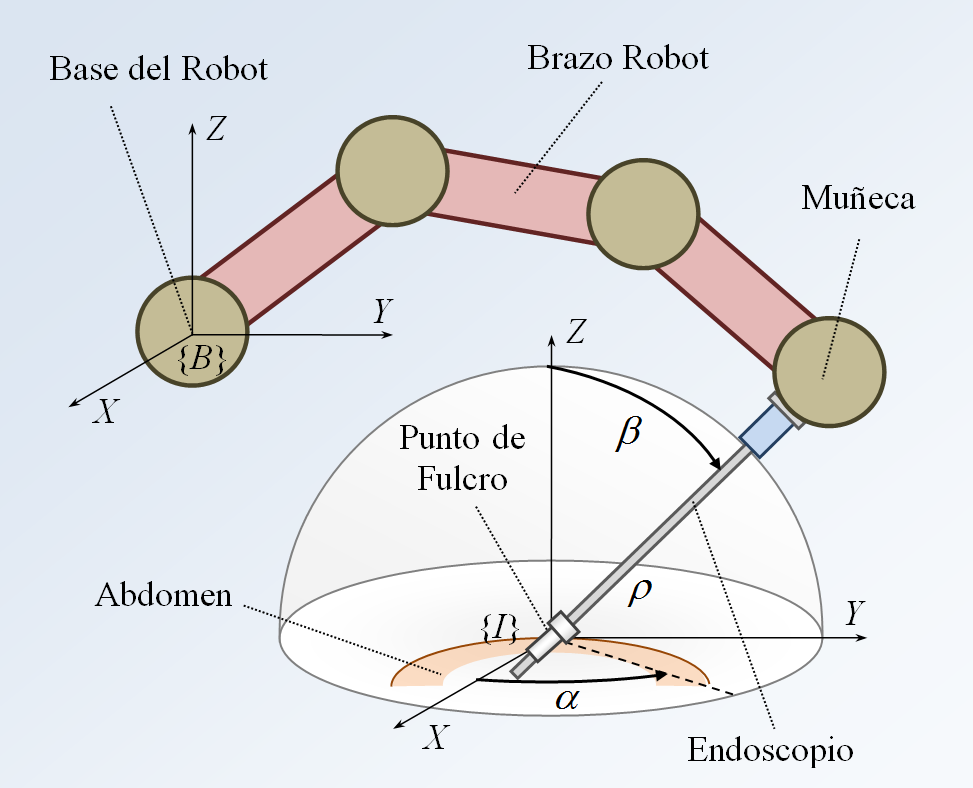 | Problema de posicionamiento del instrumental quirúrgicoEl endoscopio se introduce a través del abdomen en el denominado punto de fulcro. Se trata de orientar el instrumento con un ángulo de giro α, otro de elevación β y situar la cámara a una distancia ρ del fulcro. Estas coordenadas esféricas se definen con respecto a un sistema de coordenadas solidario al punto de fulcro. En la figura de la izquierda se ilustran estos aspectos. |
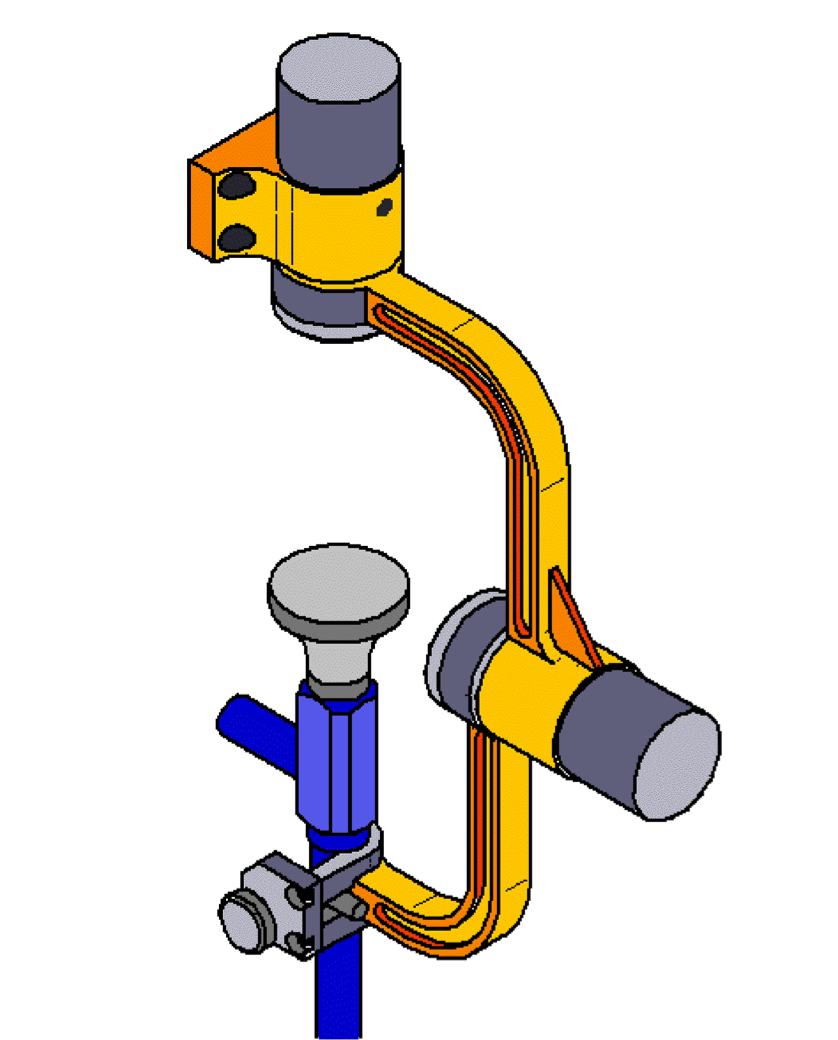 | Mecanismo de muñeca pasivaTipo de muñeca utilizada en el asistente quirúrgico que se caracteriza por poseer dos articulaciones pasivas cuyos ejes se cortan en un punto (ver figura de la izquierda). Gracias a los encoders articulares se puede calcular la orientación α y β antes definidas, pero resulta imposible la medida de la distancia ρ. Esta última resulta imprescindible para posicionar con precisión el endoscopio. |
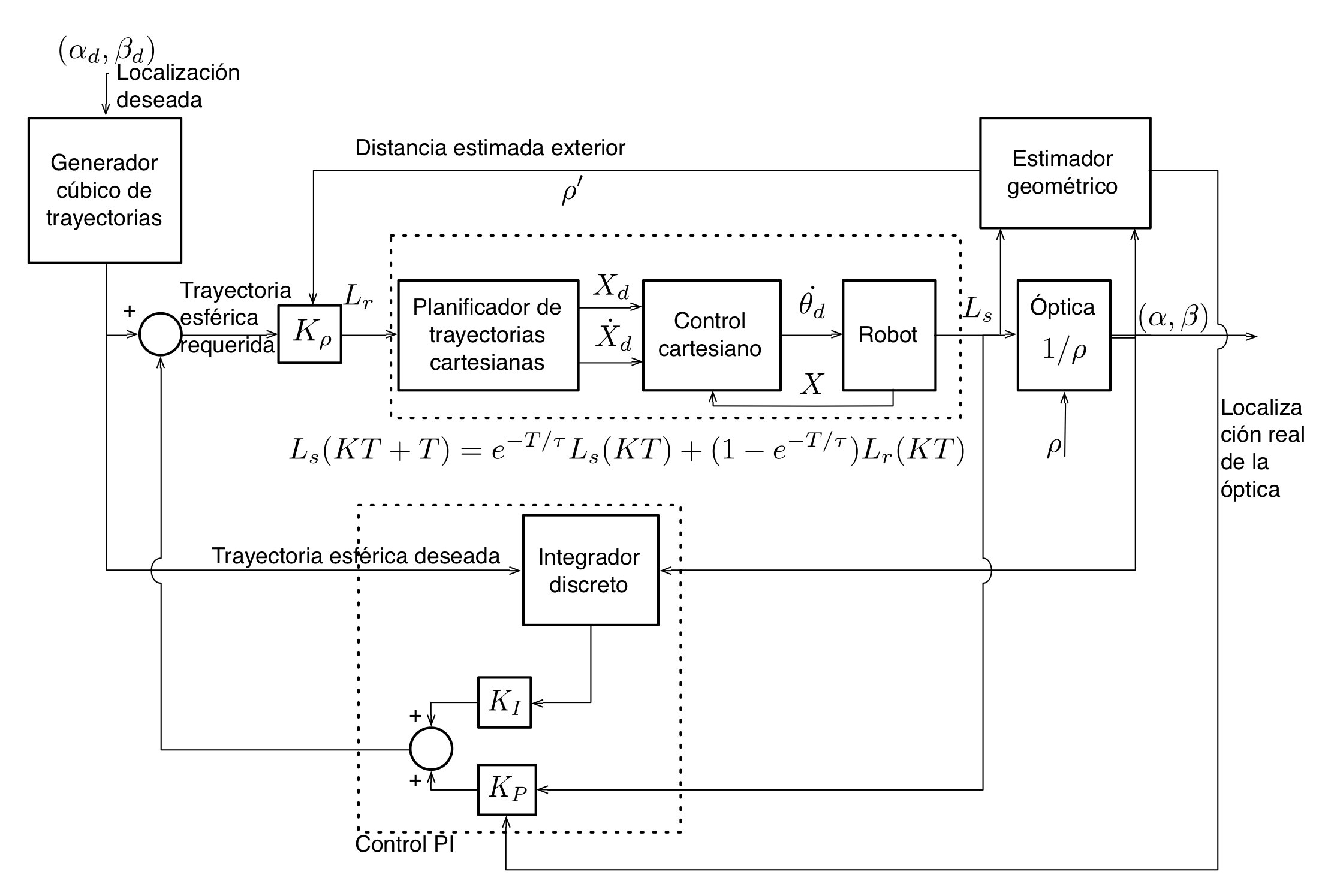 | Esquema de control para muñeca pasivaLos esquemas de control del instrumental quirúrgico se basan en estimar la distancia ρ (de la cámara al punto de fulcro) mediante métodos geométricos. Asimismo, no corrigen los errores de orientación del endoscopio debido a una mala estimación de ρ. El esquema propuesto (figura de la izquierda) propone una solución basada en teoría de control, que no sólo estima ρ sino que además corrige los errores de orientación del endoscopio. El controlador posee dos bucles anidados con dos funcionalidades distintas. El bucle interno tiene como misión hacer que el robot cuando siga una trayectoria cartesiana posea un comportamiento dinámico específico. El bucle externo realiza dos acciones. Mediante el control esférico corrige los errores de orientación del endoscopio, y al mismo tiempo el estimador geométrico realiza los cálculos del valor de ρ de manera que reduzca al mínimo los errores de estimación. Esta doble acción confiere robustez y precisión al esquema de control. Se encuentra implantado en el robot ERM. |
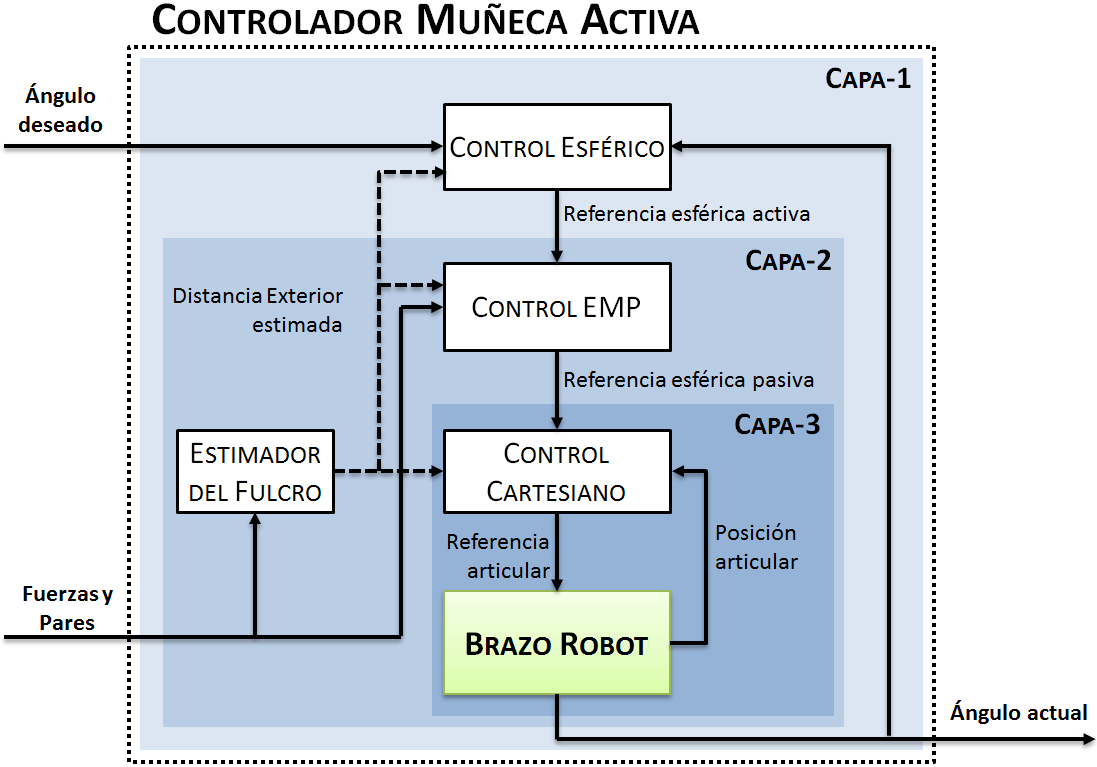 | Esquema de control de 3 capas para muñeca active mediante emulación de muñeca pasivaLos robots dotados de muñecas activas pueden ejercer fuerzas no deseadas sobre el abdomen del paciente si existe incertidumbre en la localización del fulcro. Para evitarlo, se ha propuesto emular el comportamiento de una muñeca pasiva de manera que la medida de la fuerza ejercida sobre el abdomen permite estimar el fulcro para así realizar un control de la orientación del endoscopio análogo al comportamiento de una muñeca pasiva. El esquema de control, que se ha dividido en tres capas para facilitar el estudio de la estabilidad del sistema, se divide en una primera capa interna de control cartesiano del robot, una capa intermedia que controla la posición estimada del fulcro, y una capa externa que controla el posicionamiento esférico del endoscopio. |
Planificación Automatizada
 | AutoguiadoEl sistema de auto-guiado consiste en alcanzar una posición definida por una herramienta del cirujano, mientras que la otra se considera un obstáculo que el robot debe evitar. Para ello, tanto la velocidad actual del robot como de la herramienta obstáculo son procesadas mediante un algoritmo de Lógica Borrosa para planificar la trayectoria del robot mediante la combinación de tres comportamientos: uno que encuentre una trayectoria hacia el objetivo evitando obstáculos estáticos mediante la metodología de Campos Potenciales Artificiales (CPA); otro para corregir la velocidad del robot en función del movimiento del obstáculo así como de la distancia entre ambas herramientas; por último, un tercer comportamiento para que la herramienta guiada por el robot se desplace en la dirección que lo hace el obstáculo cuando la colisión la fuerza el propio cirujano. |
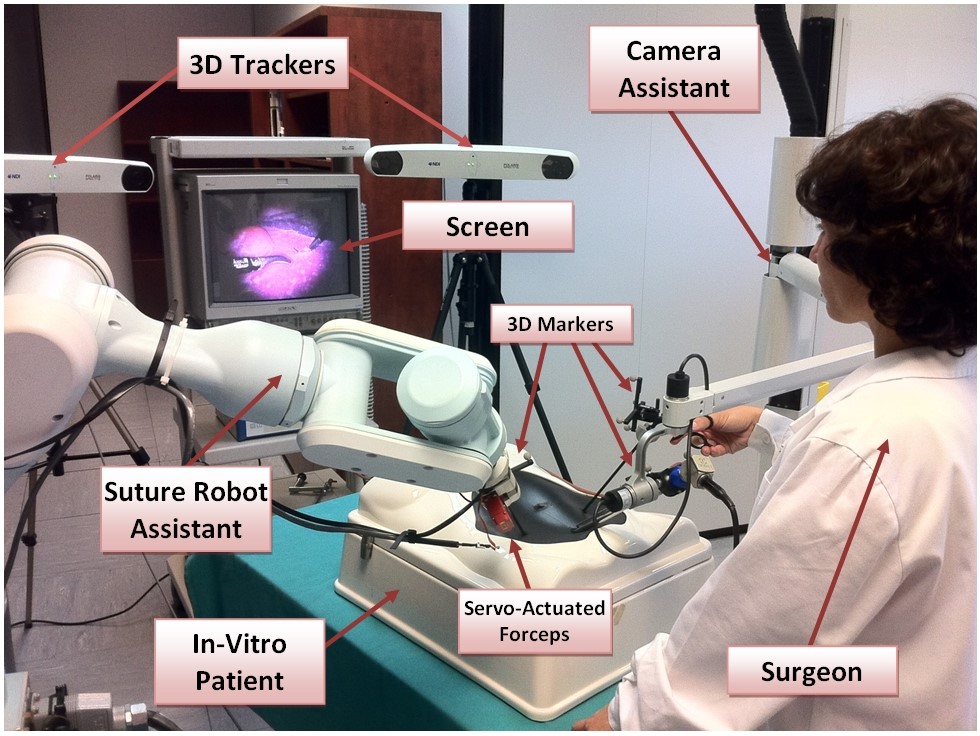 | Sistemas automáticosEl desarrollo de movimientos automáticos consiste en la asistencia en ciertos movimientos característicos de las operaciones. Concretamente se trata de la automatización de una de las herramientas quirúrgicas para la asistencia al cirujano durante una sutura. El sistema completo detecta las distintas fases del movimiento de sutura mediante un reconocedor de maniobras y un sistema de visión por computador que detecta la posición y orientación de la aguja de forma que el robot es capaz de actuar de forma colaborativa con el cirujano. |
Arquitecturas de Control Tolerante a Fallos
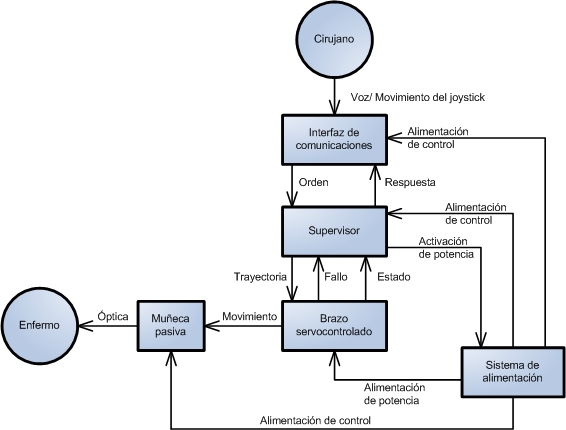 | Arquitectura funcional implantada en el ERMUn requisito fundamental en las aplicaciones médicas es garantizar la seguridad del sistema. Para ello, el primer paso se define como el diseño del sistema en base a un conjunto de módulos que poseen una funcionalidad específica. Un supervisor vigilará el correcto funcionamiento de cada uno de los módulos (aparece en el centro de la figura izquierda). Ante la detección de cualquier situación anómala pondrá al asistente quirúrgico en “modo de fallo”. Esta técnica requiere estudiar todos los posible fallos que se pueden dar en cada uno de los módulos, la manera en la que se detectarán y planificar como se actuará en consecuencia. |
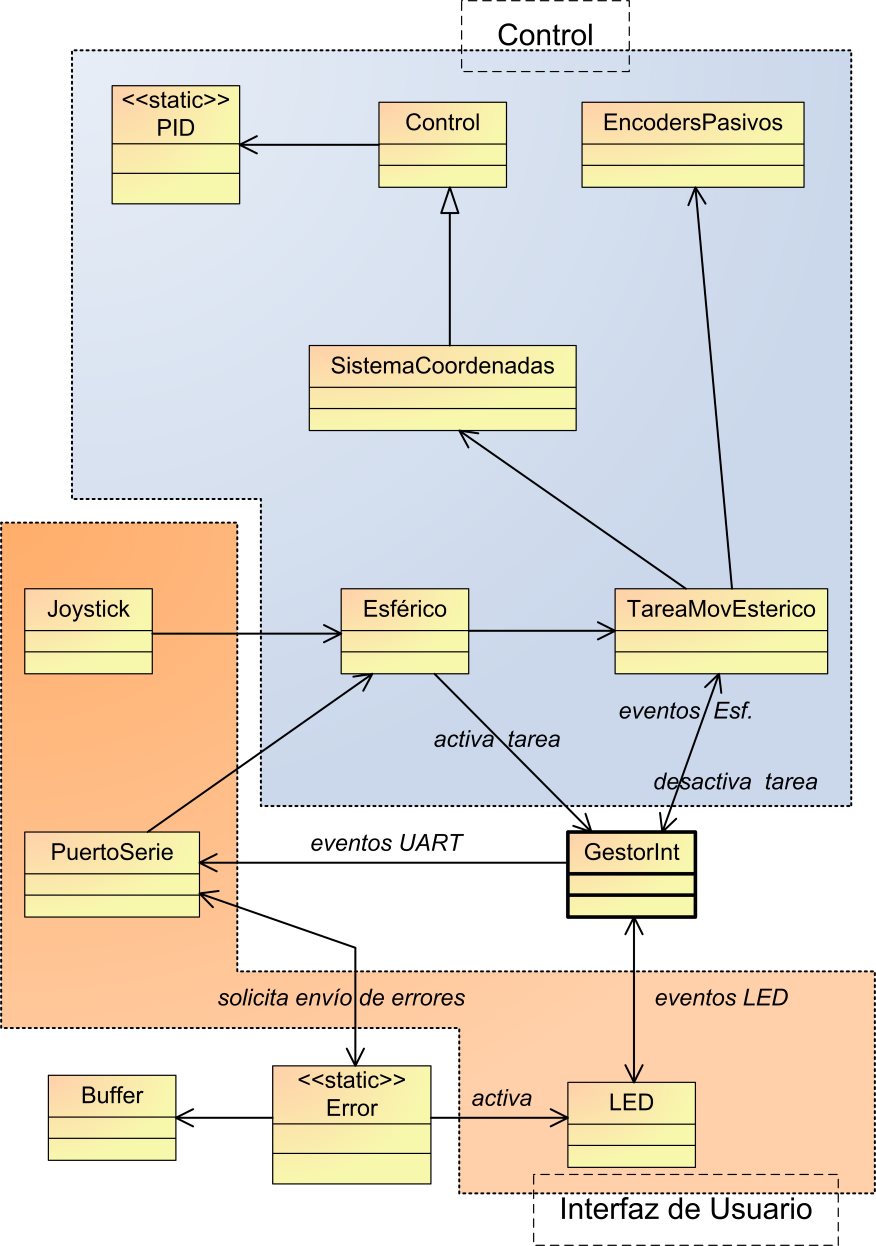 | Diseño UML aplicado en el ERMLa programación del supervisor de la arquitectura funcional también resulta crítica. Para asegurar que el programa se encuentre libre de errores se sigue una codificación con unas normas de estilo, y a cada módulo UML se le realizan pruebas unitarias, pruebas de integración funcional y finalmente de integración con el hardware. En la figura izquierda aparece el esquema a UML programado en el supervisor de la arquitectura funcional. |
Interfaces Hombre-Máquina
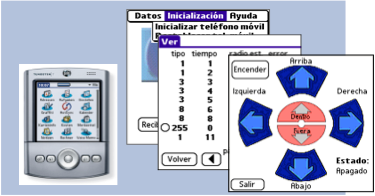 | Interfaz basado en PDACon el uso de una PDA se consigue una comunicación cómoda con el asistente robótico con la que no sólo se emiten órdenes de movimiento a este último, sino que también permite realizar tareas de supervisión. En concreto, se puede obtener información sobre el estado del robot, precisión de sus movimientos o guardar un registro de todas las acciones realizadas. En la figura de la izquierda aparecen capturas de la interfaz desarrollada y basada en PDA. |
 | Reconocedor de comandos de vozSe trata de un sistema que contiene un reconocedor de voz basado en un DSP, y que transmite de forma digital al asistente robótico los comandos de movimientos del robot, ya codificados. Con ello, se soluciona el problema de las interferencias de las soluciones basadas en transmisiones analógicas. Asimismo, cada usuario puede introducir en una tarjeta a su perfil de voz, de manera que sólo se reconocen las órdenes del perfil seleccionado. En fotografía de la izquierda se puede observar el sistema desarrollado. |
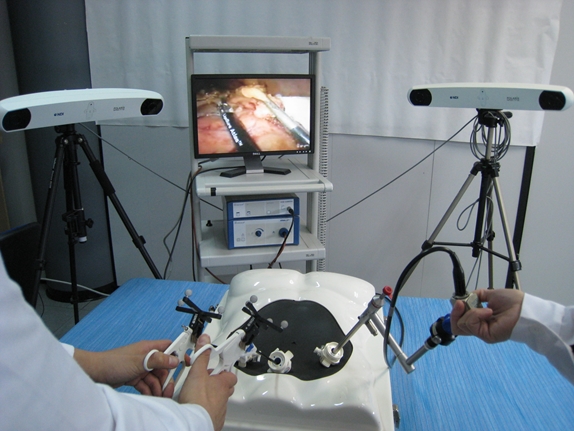 | Reconocedor de gestos quirúrgicosEl reconocimiento de los gestos o maniobras quirúrgicas que realiza el cirujano a lo largo de la intervención permite tener un conocimiento del estado actual en que se encuentra el desarrollo del protocolo quirúrgico. Esto puede ser utilizado como un medio de comunicación más natural y confortable entre el cirujano o y el robot, y por lo tanto considerado como una forma alternativa para dar órdenes o comandos. Mediante un modelado de las tareas quirúrgicas en el que se han utilizado los modelos de Markov ocultos se ha construido una librería de maniobras y un sistema de reconocimiento de maniobras que permite reconocer la maniobra actual ejecutada por el cirujano. El sistema de reconocimiento cuenta con un sistema de adquisición de datos que recoge la información sobre el posicionado de las herramientas quirúrgicas del cirujano mediante sensores 3D y de esta forma, las interacciones del instrumental son adquiridas. |
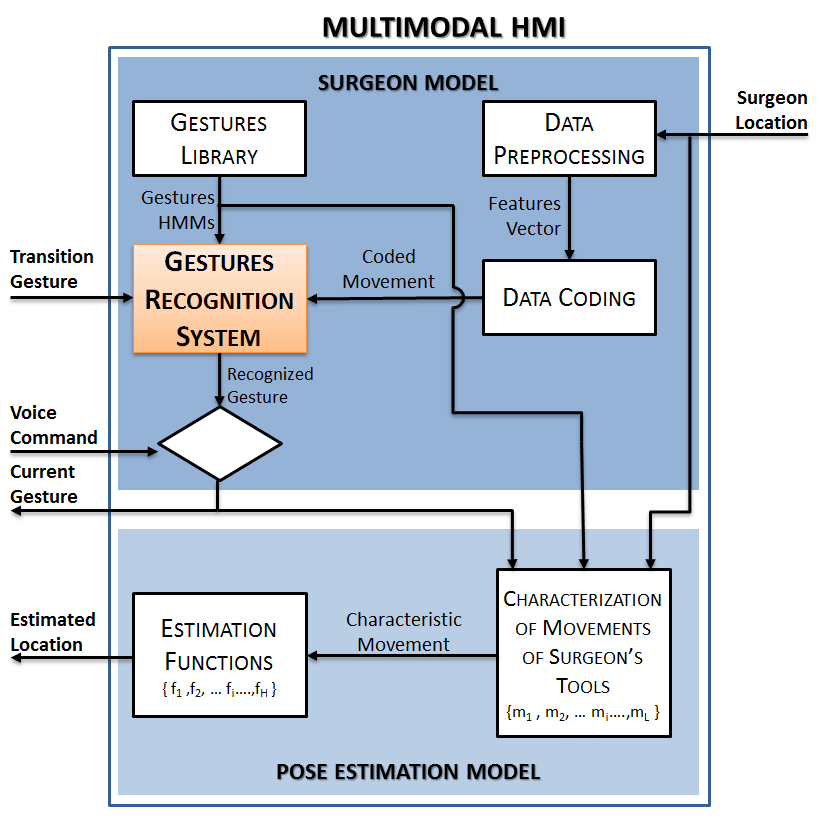 | Interfaz multimodalEl desarrollo de un asistente robótico para procedimientos laparoscópicos que sea capaz de actuar de forma semiautónoma, colaborando con el cirujano no solo en el manejo de la óptica sino también en el manejo de una herramienta adicional de apoyo, ha planteado nuevos retos en el diseño de la interfaz. La interfaz necesaria para poder controlar este tipo de robot no debe sobrecargar al cirujano con un gran número de comandos y botoneras, por lo que se ha desarrollado un sistema capaz de interpretar los gestos quirúrgicos del cirujano para poder conocer la fase actual de la intervención o comandos específicos del cirujano. La interfaz multimodal combina los comandos de gestos con los de voz, de tal forma que se parezca a la relación entre el cirujano y el asistente humano. |
Telecirugía
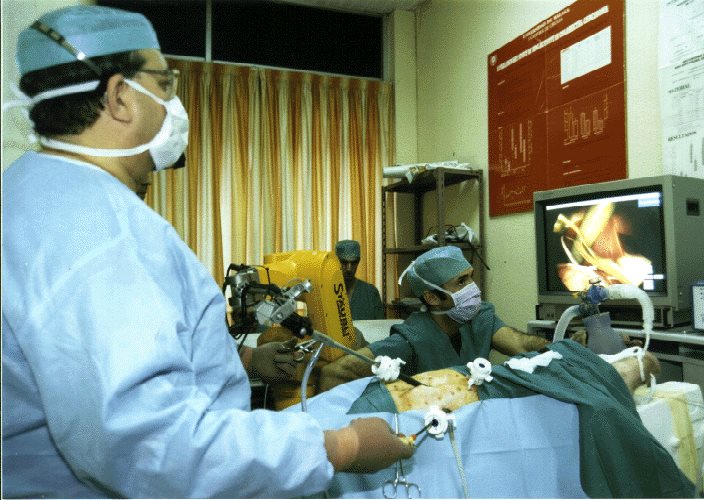
| Teleoperación del asistente ERMEn las dos fotografías de la izquierda se muestra primero, en la superior, a los cirujanos en el quirófano durante el transcurso de la intervención con un animal de experimentación, y en la inferior al cirujano remoto con un interfaz consistente en un monitor dónde puede ver la imagen de la cámara laparoscópica y una space ball con la que puede comandar el robot. El cometido de este último cirujano se define como supervisar la intervención de manera que puede actuar de tres maneras: i) Comunicarse con los cirujanos locales mediante vídeo-conferencia, ii) realizar marcas en su monitor que pueden ver los cirujanos locales en el suyo o iii) mover el robot para que centre la cámara en cierta región de interés de la imagen. |


| Teleoperación de quirófano robotizado remotoEl desarrollo de un asistente robótico para procedimientos laparoscópicos que sea capaz de actuar de forma semiautónoma, colaborando con el cirujano no solo en el manejo de la óptica sino también en el manejo de una herramienta adicional de apoyo, ha planteado nuevos retos en el diseño de la interfaz. La interfaz necesaria para poder controlar este tipo de robot no debe sobrecargar al cirujano con un gran número de comandos y botoneras, por lo que se ha desarrollado un sistema capaz de interpretar los gestos quirúrgicos del cirujano para poder conocer la fase actual de la intervención o comandos específicos del cirujano. La interfaz multimodal combina los comandos de gestos con los de voz, de tal forma que se parezca a la relación entre el cirujano y el asistente humano. |


| Realimentación de fuerzas hápticasLa robótica quirúrgica asistida mediante teleoperación permite al cirujano tener un control directo sobre la actuación de los brazos manipuladores, los cuales ofrecen una mayor precisión en el movimiento de las herramientas quirúrgicas. Sin embargo, se pierde el contacto directo entre el cirujano y el paciente, lo que conlleva una pérdida de sensaciones de tacto y presión. Para minimizar esta limitación el grupo de Robótica Médica de la Universidad de Málaga ha trabajado en sistemas de control de teleoperación con realimentación de fuerzas que permiten al cirujano recuperar parte de esa sensación de contacto con el paciente. Este método de control requiere resolver ciertos problemas inherentes al sistema como son el retardo de la señal de fuerzas enviada desde un sensor acoplado al robot hasta el dispositivo háptico manejado por el cirujano, así como la separación de la medición de la fuerza ejercida en el punto de inserción de la fuerza de contacto con el tejido interno del paciente. |

Ensayos Clínicos
| Asistente ISAPrimer prototipo desarrollado para la cirugía laparoscópica y basado en un manipulador industrial. Se utilizó para estudiar la viabilidad del uso de un asistente robótico para manejar el endoscopio en este tipo de intervenciones. Se realizaron en primer lugar pruebas in-vitro, donde se evaluó la eficacia del robot parra posicionar la cámara laparoscópica. Después se pasó a la fase con animales de experimentación dónde se evaluó en un rango de intervenciones que comprendieron la colecistectomia, la funduplicatura de Nilssen o extirpación de parte del cólon. A la izquierda se muestra una fotografía de una de las intervenciones con animales. |
| Cistoscopia robotizadaSe trató de una adaptación del asistente ISA para la exploración de la vejiga urinaria. Los ensayos se realizaron con animales de experimentación y esta vez el cistoscopio se introducía directamente por la uretra del animal. El éxito de estos ensayos demostró que un mismo robot puede emplearse para más de una tarea distinta, lo que repercute en la posibilidad de amortizar antes su coste. En la fotografía de la izquierda se muestra uno de los ensayos con animales de experimentación. |
| Asistente ERMRobot llevado a la clínica humana y con el que se realizó un estudio en el que participaron treinta y dos enfermos. Para ello, el robot se adaptó para que cumpliera con todas las normativas exigidas a los aparatos de electromedicina y se elaboró un protocolo clínico que describía el ámbito del estudio. Se concluyó que mediante el uso de este robot se disminuye el tiempo de intervención, asimismo lo hace la fatiga del cirujano y no influye en el tiempo de recuperación del paciente. A la izquierda aparece una fotografía que refleja uno de los instantes de una intervención. |

| Ensayos in-vitro para el análisis de maniobras quirúrgicasSe han llevado a cabo ensayos de maniobras in-vitro a partir del estudio de los protocolos clínicos para conseguir la confección del modelo del cirujano, en concreto el procedimiento de colecistectomía. Estos ensayos in-vitro han permitido la construcción de un sistema de reconocimiento de maniobras que forma parte de la interfaz multimodal así como la elaboración de los movimientos automáticos que el robot debe hacer para colaborar con el cirujano en maniobras tales como la sutura. |

| Robots MiniaturizadosSe ha realizado un ensayo clínico con un modelo porcino para probar la viabilidad de utilizar un mini-robot cámara en un entorno real. Este ensayo se ha centrado en analizar tanto la calidad de la imagen proporcionada por la cámara, como la interacción magnética a través de la pared abdominal. |