
beforecontenttitle
Proyectos
Después del título del contenido
Antes del cuerpo del contenido
Trozos html editables
Trozos html editables
Los proyectos de investigación que el grupo de Robótica Médica ha llevado a cabo, así como los que están realizando en la actualidad son:
Asistente robótico para cirugía laparoscópica y telediagnóstico
 El objetivo global del presente proyecto se define como el desarrollo de un asistente robótico para cirugía laparoscópica que represente una ayuda eficaz para el cirujano. Asimismo, se le añadirán prestaciones adicionales para que pueda ser dirigido de forma remota mediante técnicas de telepresencia. No se parte desde cero, sino de un prototipo que se encuentra totalmente operativo y que es fruto de investigaciones anteriores. Leer más...
El objetivo global del presente proyecto se define como el desarrollo de un asistente robótico para cirugía laparoscópica que represente una ayuda eficaz para el cirujano. Asimismo, se le añadirán prestaciones adicionales para que pueda ser dirigido de forma remota mediante técnicas de telepresencia. No se parte desde cero, sino de un prototipo que se encuentra totalmente operativo y que es fruto de investigaciones anteriores. Leer más...Sistema robótico modular para telecirugía mínimamente invasiva
 Se trata de construir un brazo robótico específico, y especializado en portar la cámara en cirugía laparoscópica. Se caracterizará por adaptarse perfectamente a las necesidades de espacio del quirófano y por no requerir ningún tipo de instalación para su puesta en marcha. Se gobernará mediante la voz, pero mediante un sistema adicional, que se ubicará en la columna de laparoscopia y que con el que se comunicará de forma inalámbrica, se le añadirán unas prestaciones avanzadas para la telemedicina: un cirujano situado en un lugar remoto podrá realizar labores de telecirugía, telediagnóstico o actuar como un telementor. Asimismo, se propone seguir investigando sobre la telemanipulación y aplicarlo tanto a la cirugía laparoscópica como a la resección transuretral de la próstata. Leer más...
Se trata de construir un brazo robótico específico, y especializado en portar la cámara en cirugía laparoscópica. Se caracterizará por adaptarse perfectamente a las necesidades de espacio del quirófano y por no requerir ningún tipo de instalación para su puesta en marcha. Se gobernará mediante la voz, pero mediante un sistema adicional, que se ubicará en la columna de laparoscopia y que con el que se comunicará de forma inalámbrica, se le añadirán unas prestaciones avanzadas para la telemedicina: un cirujano situado en un lugar remoto podrá realizar labores de telecirugía, telediagnóstico o actuar como un telementor. Asimismo, se propone seguir investigando sobre la telemanipulación y aplicarlo tanto a la cirugía laparoscópica como a la resección transuretral de la próstata. Leer más...Robot quirúrgico autoguiado para cirugía mínimamente invasiva en solitario
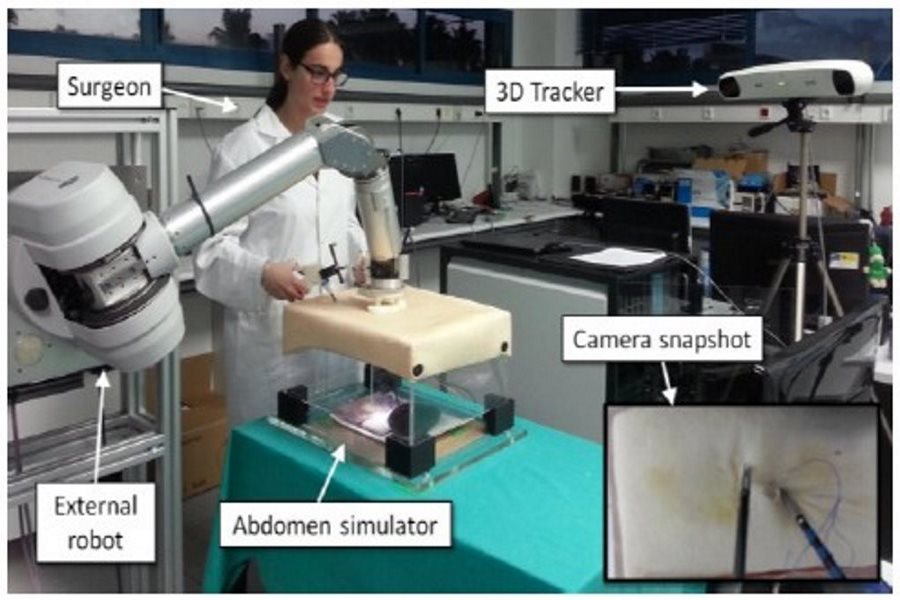
 La presente propuesta pretende abordar el problema de la cirugía en solitario mediante un sistema robótico autónomo dotado de dos brazos capaces de realizar movimientos de forma autoguiada. Uno se encargará de guiar la cámara laparoscópica y otro se utilizará para mover un instrumental adicional. De este modo, en intervenciones dónde resulta necesario un cirujano principal y otro ayudante, con el apoyo de estos dos brazos se pretende sustituir éste último. Este objetivo se aplicará a ciertos procedimientos de cirugía laparoscópica en los que se identificará la posibilidad de la ejecución de maniobras específicas de forma autónoma, para la cual se utilizarán varias fuentes de realimentación sensorial. Leer más...
La presente propuesta pretende abordar el problema de la cirugía en solitario mediante un sistema robótico autónomo dotado de dos brazos capaces de realizar movimientos de forma autoguiada. Uno se encargará de guiar la cámara laparoscópica y otro se utilizará para mover un instrumental adicional. De este modo, en intervenciones dónde resulta necesario un cirujano principal y otro ayudante, con el apoyo de estos dos brazos se pretende sustituir éste último. Este objetivo se aplicará a ciertos procedimientos de cirugía laparoscópica en los que se identificará la posibilidad de la ejecución de maniobras específicas de forma autónoma, para la cual se utilizarán varias fuentes de realimentación sensorial. Leer más...Robot quirúrgico autónomo para cirugía mínimamente invasiva
 La presente propuesta se centra en la reciente línea puesta en marcha por el grupo de investigación solicitante en el campo de la cirugía en solitario en el marco de la cirugía mínimamente invasiva. Esta línea de investigación se centra en la sustitución total del asistente humano por un robot durante la intervención, de manera que este sea capaz de ayudar en el procedimiento quirúrgico en interacción directa con el cirujano. Este tipo de sistemas tiene que poseer la versatilidad necesaria tanto en el sistema de comunicación con la máquina así, como en el tipo de movimientos que realiza de suerte que el cirujano encuentre la misma comodidad que con el asistente humano. Leer más...
La presente propuesta se centra en la reciente línea puesta en marcha por el grupo de investigación solicitante en el campo de la cirugía en solitario en el marco de la cirugía mínimamente invasiva. Esta línea de investigación se centra en la sustitución total del asistente humano por un robot durante la intervención, de manera que este sea capaz de ayudar en el procedimiento quirúrgico en interacción directa con el cirujano. Este tipo de sistemas tiene que poseer la versatilidad necesaria tanto en el sistema de comunicación con la máquina así, como en el tipo de movimientos que realiza de suerte que el cirujano encuentre la misma comodidad que con el asistente humano. Leer más...Plataforma robotizada para la asistencia en técnicas NOTES/SILS
 Diseño y desarrollo de una plataforma robótica capaz de situar en el interior de la cavidad abdominal un micro-robot dotado de sensores y herramientas quirúrgicas que trabaje de forma colaborativa con el cirujano. El sistema podrá programarse fuera de línea para establecer el plan maestro durante la intervención y de forma intraoperatoria mediante un interfase persona-máquina multi-modal. Por otro lado, el sistema robótico en sí, constará de dos brazos posicionadores y un micro robot, de suerte que los dos primeros, mediante el uso de campos magnéticos, desplazarán y ubicarán al tercero en el campo operatorio del interior del abdomen. Leer más...
Diseño y desarrollo de una plataforma robótica capaz de situar en el interior de la cavidad abdominal un micro-robot dotado de sensores y herramientas quirúrgicas que trabaje de forma colaborativa con el cirujano. El sistema podrá programarse fuera de línea para establecer el plan maestro durante la intervención y de forma intraoperatoria mediante un interfase persona-máquina multi-modal. Por otro lado, el sistema robótico en sí, constará de dos brazos posicionadores y un micro robot, de suerte que los dos primeros, mediante el uso de campos magnéticos, desplazarán y ubicarán al tercero en el campo operatorio del interior del abdomen. Leer más...
Sistema robotizado colaborativo para cirugía laparoscópica asistida por la mano
 Sistema robotizado orientado al abordaje HALS y encuadrado dentro del concepto de robot “co-worker”, donde la máquina trabaja codo con codo con el cirujano, colaborando en las maniobras quirúrgicas y aprendiendo de la práctica. Se persigue el objetivo de que con la experiencia mejore la asistencia que realiza y que sea capaz de detectar situaciones de emergencia. Para ello, se plantea que este sistema robotizado comprenda un manipulador capaz de operar una herramienta laparoscópica articulada y un endoscopio, y otro especializado en el movimiento de mini-robots dentro de la cavidad abdominal. Por otro lado, incluirá una interfaz persona-máquina fundamentada en un guante quirúrgico inteligente y la capacidad de emular el concepto de “abdomen transparente” mediante la combinación de imagen real con realidad aumentada. Leer más...
Sistema robotizado orientado al abordaje HALS y encuadrado dentro del concepto de robot “co-worker”, donde la máquina trabaja codo con codo con el cirujano, colaborando en las maniobras quirúrgicas y aprendiendo de la práctica. Se persigue el objetivo de que con la experiencia mejore la asistencia que realiza y que sea capaz de detectar situaciones de emergencia. Para ello, se plantea que este sistema robotizado comprenda un manipulador capaz de operar una herramienta laparoscópica articulada y un endoscopio, y otro especializado en el movimiento de mini-robots dentro de la cavidad abdominal. Por otro lado, incluirá una interfaz persona-máquina fundamentada en un guante quirúrgico inteligente y la capacidad de emular el concepto de “abdomen transparente” mediante la combinación de imagen real con realidad aumentada. Leer más...
BROCA: La Plataforma Robótica Quirúrgica
 Este proyecto tiene como objetivo el diseño y desarrollo de un nuevo concepto de sistema robótico quirúrgico que busca democratizar la robótica quirúrgica. Es el primer proyecto de ámbito nacional dentro del marco de Compra Pública Pre-Comercial (en el campo de la biomedicina) financiado en España. Ha sido coordinado por la Universidad de Córdoba y el Instituto Maimónides de Investigación Biomédica de Córdoba (IMIBIC). En concreto, los ingenieros de la Universidad de Córdoba se centraron en el análisis de imagen, mientras que profesionales de 6 especialidades quirúrgicas del Hospital sentaron las bases de los requisitos de la plataforma robótica así como de los ensayos finales. Las tareas técnicas para construir los brazos robóticas fueron subcontratadas a Tecnalia y su socio la Universidad de Málaga. La integración de la parte técnica con el equipo de cirujanos desde el comienzo del proyecto permitió que el robot cumpliera sus expectativas de beneficio de los pacientes.
Este proyecto tiene como objetivo el diseño y desarrollo de un nuevo concepto de sistema robótico quirúrgico que busca democratizar la robótica quirúrgica. Es el primer proyecto de ámbito nacional dentro del marco de Compra Pública Pre-Comercial (en el campo de la biomedicina) financiado en España. Ha sido coordinado por la Universidad de Córdoba y el Instituto Maimónides de Investigación Biomédica de Córdoba (IMIBIC). En concreto, los ingenieros de la Universidad de Córdoba se centraron en el análisis de imagen, mientras que profesionales de 6 especialidades quirúrgicas del Hospital sentaron las bases de los requisitos de la plataforma robótica así como de los ensayos finales. Las tareas técnicas para construir los brazos robóticas fueron subcontratadas a Tecnalia y su socio la Universidad de Málaga. La integración de la parte técnica con el equipo de cirujanos desde el comienzo del proyecto permitió que el robot cumpliera sus expectativas de beneficio de los pacientes.
Sistema robótico colaborativo para la corrección del brain-shift en aplicaciones de neurocirugía endonasal
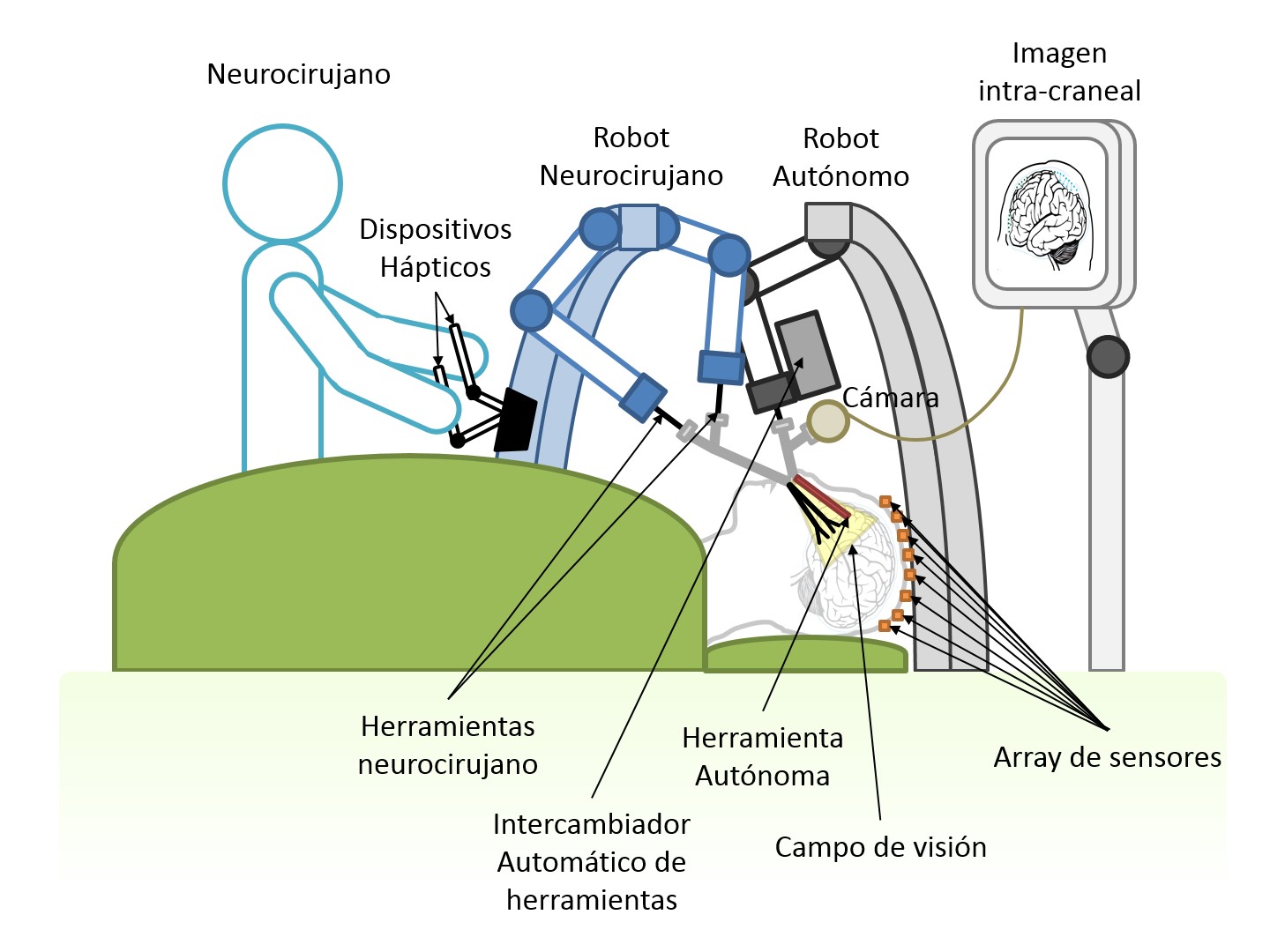 La presente propuesta estudiará la extensión del concepto de sistema robótico “co-worker”, dentro de un esquema de aprendizaje cognitivo, aplicado al abordaje endonasal. Proporcionará al neurocirujano seguridad en la intervención mediante la asistencia en forma de movimientos automáticos, colaborativos, o por control compartido, así como con realidad aumentada. El sistema robótico se adaptará a la ergonomía de la intervención, realizará una navegación quirúrgica precisa, basada en la información online proporcionada para medir el efecto brain-shift y tendrá en cuenta la planificación pre-operatoria. Asimismo, contará con un intercambiador automático de herramientas quirúrgicas. Leer más...
La presente propuesta estudiará la extensión del concepto de sistema robótico “co-worker”, dentro de un esquema de aprendizaje cognitivo, aplicado al abordaje endonasal. Proporcionará al neurocirujano seguridad en la intervención mediante la asistencia en forma de movimientos automáticos, colaborativos, o por control compartido, así como con realidad aumentada. El sistema robótico se adaptará a la ergonomía de la intervención, realizará una navegación quirúrgica precisa, basada en la información online proporcionada para medir el efecto brain-shift y tendrá en cuenta la planificación pre-operatoria. Asimismo, contará con un intercambiador automático de herramientas quirúrgicas. Leer más...

Después de cuerpo del contenido

