
Proyecto CRANEEAL
-
Sistema robótico colaborativo para la corrección del brain-shift en aplicaciones de neurocirugía endonasal
Entidad financiadora: Ministerio de Economía, Industria y Competitividad. MINECO
Referencia: DPI2016-80391-C3-1-R
Universidad: Universidad de Málaga, Universidad Miguel Hernández, Universidad de Valladolid
Duración: Desde 01/01/2017 hasta 31/12/2019
Investigador Responsable: Víctor Fernando Muñoz Martínez
Resumen
La cirugía endoscópica endonasal ofrece a los neurocirujanos una técnica quirúrgica de mínima invasión para intervenciones en la base craneal, en la se introduce instrumental quirúrgico específico y un endoscopio a través de las fosas nasales del paciente. Este tipo de abordaje evita cicatrices en la cara y reduce el tiempo de recuperación del paciente con respecto a otros abordajes. Sin embargo, requiere pericia y precisión en los movimientos del neurocirujano ya que en el campo operatorio conviven estructuras anatómicas críticas además de producirse desplazamientos de la materia cerebral fruto del cambio de presión interior al practicar el orificio en la base del craneo (brain-shift). Actualmente, los robots que asisten a la neurocirugía se centran en la ubicación de electrodos en zonas profundas del cerebro, al control compartido para la craneotomía, y pocos, al manejo del endoscopio, guiado por el cirujano, para el abordaje endonasal.
La presente propuesta estudiará la extensión del concepto de sistema robótico “co-worker”, dentro de un esquema de aprendizaje cognitivo, aplicado al abordaje endonasal. Proporcionará al neurocirujano seguridad en la intervención mediante la asistencia en forma de movimientos automáticos, colaborativos, o por control compartido, así como con realidad aumentada. El sistema robótico se adaptará a la ergonomía de la intervención, realizará una navegación quirúrgica precisa, basada en la información online proporcionada para medir el efecto brain-shift y tendrá en cuenta la planificación pre-operatoria. Asimismo, contará con un intercambiador automático de herramientas quirúrgicas. De este manera, el sistema robótico incorporará dentro de una arquitectura cognitiva tolerante a fallos, un sistema de control de movimentos que evite daños en las fosas nasales, un planificador de movimentos colaborativos con capacidad de aprendizaje y un modelo matemático para la predicción de los desplazamientos tridimensionales del cerebro basado en la información intra-operatoria.
El sistema robótico que se desarrolle, fruto de la investigación propuesta, seguirá un concepto de plataforma abierta y escalable, de suerte que, será validado mediante experimentos in-vitro que emulen una intervención de neurocirugía por abordaje endonasal.
Solución Global
La propuesta de este proyecto presenta un concepto de sistema robótico colaborativo capaz de asistir al cirujano en un escenario de cirugía endoscópica endonasal. Este escenario parte de la información obtenida en el preoperatorio, que incluye tanto el modelo tridimensional del cráneo del paciente como la identificación por parte del neurocirujano de las zonas anatómicas de interés. Además, el sistema robótico permitirá la planificación fuera de línea de actuaciones quirúrgicas a través de una simulación y modelado de la intervención.
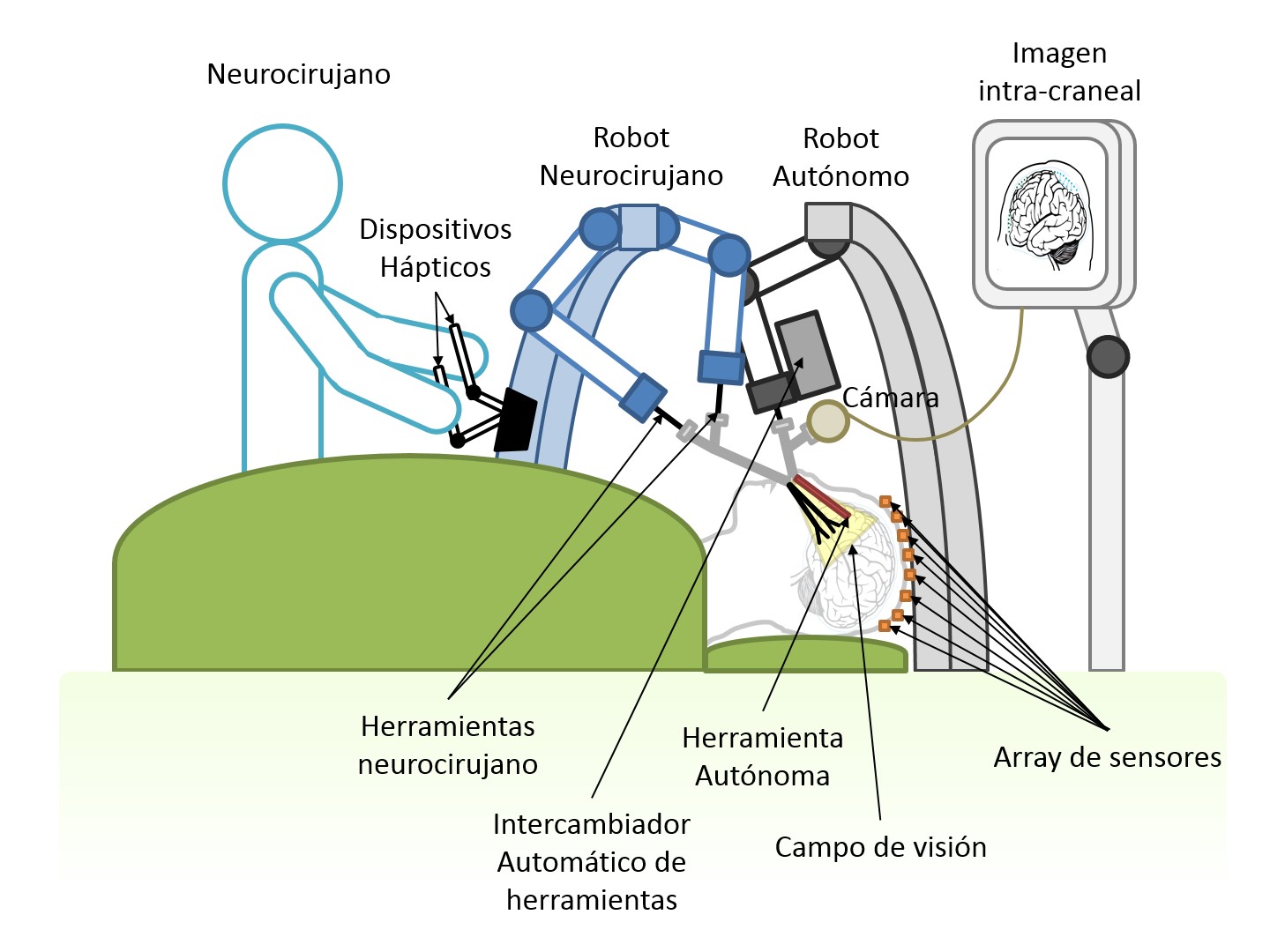
La información recopilada en el preoperatorio servirá de base para la actuación del sistema robótico durante la fase intraoperatoria tal y como se presenta en la Figura 1. Como puede observarse, las Herramientas del Neurocirujano manejadas a través de los brazos del Robot del Neurocirujano, bien en modo compartido o tele-operado con el uso de Dispositivos Hápticos, realizan las labores necesarias para liberar el camino hacia la zona anatómica de interés. A su vez, el Robot Autónomo proporcionará asistencia con un instrumento adicional navegado de forma autónoma y supervisado por el Neurocirujano en todo momento. La información obtenida de dicha supervisión se empleará en realizar un aprendizaje en línea que corrija futuras decisiones autónomas. Entre las funciones que puede desempeñar el robot autónomo se incluyen: el mapeado de actividad neurológica a través de un electrodo que indique la proximidad al tejido afectado; navegación autónoma del instrumental de aspiración; y mecanizado de la base craneal para el acceso a la zona de interés. El intercambio entre las distintas herramientas que desempeñan cada una de estas tareas se realizará a través de un Intercambiador Automático de Herramientas. Por otro lado, el robot autónomo también controla el movimiento de la Cámara y su navegación en función de la fase de la intervención, mientras que la Imagen Intra-Craneal obtenida integra los elementos de interés identificados en el preoperatorio mediante algoritmos de realidad aumentada. Estos elementos habrán visto modificadas sus localizaciones debido fundamentalmente a la perforación de la duramadre y la pérdida de presión de la cavidad craneal (brain-shift), por lo que se emplea un Array de Sensores que registre ciertos puntos del cerebro con los que corregir estas deformaciones. Todo el conjunto del sistema robótico se diseñará teniendo en cuenta criterios de ergonomía y será controlado por un sistema que incorpore tanto supervisión de faltas como corrección de las tareas quirúrgicas autónomas fruto del aprendizaje cognitivo obtenido a través de la interacción con el neurocirujano.
Figura 1
Objetivos planteados
La presente propuesta de proyecto se centra en explorar el uso de las tecnologías robóticas desarrolladas en el campo de la cirugía laparoscópica por los solicitantes para su extrapolación a la neurocirugía por abordaje endonasal. En este sentido, la hipótesis de partida se enuncia como:
El uso de un asistente robótico especializado para la neurocirugía de abordaje endonasal, que colabore mediante movimientos automáticos del instrumental, que provea información adicional durante la intervención en forma de realidad aumentada o realimentación háptica, y que proporcione precisión y seguridad en los instrumentos que maneja el neurocirujano, servirá a este último para que realice el procedimiento quirúrgico con más seguridad y de una forma más cómoda, al poder concentrarse mejor en las maniobras críticas.
Según la hipótesis planteada, se considera el siguiente objetivo general para la presente propuesta de proyecto:
Establecer los procedimientos, técnicas y tecnologías necesarias para la implantación de un sistema robótico colaborativo, que siga el concepto de co-worker, capaz de ayudar en las tareas de neurocirugía robotizada por abordaje endonasal y que integre las etapas preoperatoria y operatoria.
Para lograr este objetivo general se establecen los siguientes objetivos concretos de la propuesta:
1. Diseño y desarrollo de un concepto de sistema robot especializado en el abordaje endonasal para la neurocirugía
Debe contemplar los modos de operación de movimientos automáticos, de control cooperativo y de control tele-operado, así como que se adapte ergonómicamente al cirujano, a las necesidades del quirófano y que sea capaz de realizar el cambio de herramienta quirúrgica de forma efectiva.
2. Diseño y desarrollo de un sistema de navegación neuroquirúrgica para abordaje endonasal
Durante el preoperatorio debe proporcionar las herramientas necesarias para la planificación inicial de la colaboración y de los movimientos de los instrumentos, y durante la etapa operatoria actualice el plan por el efecto brain-shift y por las manipulaciones realizadas por el neurocirujano, y que proporcione asistencia en forma de realidad aumentada.
3. Diseño y desarrollo de técnicas de cooperación entre el cirujano y el sistema robótico durante el abordaje endonasal
Fundamentadas en un enfoque cognitivo y en el concepto de robot co-worker, proporcionando en cada maniobra quirúrgica la asistencia adecuada, emulando a un asistente humano y proporcionando una forma natural de comunicación persona-máquina.
4. Integración y evaluación de la eficiencia del sistema robótico completo
Se realizará mediante la ejecución de una serie de experimentos in-vitro. Este objetivo consiste en la integración de todas las tecnologías desarrolladas en una serie de demostraciones. De esta forma, se realizará un estudio documentado que establezca cómo el uso del sistema desarrollado presenta ventajas con respecto a la neurocirugía con abordaje endonasal convencional así como los problemas e inconvenientes que aparezcan.
Entregables
- E1.1. Informe con el tipo de asistencia que proporciona el robot y requerimientos
- E1.2. Definición de la arquitectura cognitiva


