
beforecontenttitle
Projects
After content title
Before content body
Chunks
Chunks
The research projects which have been and are being carried out by the Medical Robotics group are:
Robotic assistant for laparoscopic surgery and telediagnosis. Development of the robot teleoperation system
 The total aim of this project is developing a robotic assistant for laparoscopic surgery, which represents an effective help for the surgeon. Likewise, a series of additional features will be added in order to be remotely conducted by means of telepresence techniques. The research is not started from scratch, but from a fully operational prototype which is the result of previous researches. Read more...
The total aim of this project is developing a robotic assistant for laparoscopic surgery, which represents an effective help for the surgeon. Likewise, a series of additional features will be added in order to be remotely conducted by means of telepresence techniques. The research is not started from scratch, but from a fully operational prototype which is the result of previous researches. Read more...Modular robotic system for minimally invasive telesurgery
 This project proposed the creation of a specific robot arm specialized in handling the camera during laparoscopic surgery operations. The main feature will be the perfect adaptation to the spatial conditions of the operating room and the no need of any kind of running installation. It will be managed under voice control, via a wireless communication network, using an additional system placed at the laparoscopic column. A series of advanced features for the telemedicine will be added: a remote surgeon positioned in a distant site will be able to carry out tasks of telesurgery, telediagnosis or to act as a telementor. Likewise, it expects to continue the research on telemanipulation and apply it to both the laparoscopic surgery and the transurethral resection of the prostate.Read more...
This project proposed the creation of a specific robot arm specialized in handling the camera during laparoscopic surgery operations. The main feature will be the perfect adaptation to the spatial conditions of the operating room and the no need of any kind of running installation. It will be managed under voice control, via a wireless communication network, using an additional system placed at the laparoscopic column. A series of advanced features for the telemedicine will be added: a remote surgeon positioned in a distant site will be able to carry out tasks of telesurgery, telediagnosis or to act as a telementor. Likewise, it expects to continue the research on telemanipulation and apply it to both the laparoscopic surgery and the transurethral resection of the prostate.Read more...Auto-guided surgical robot for minimally invasive solo-surgery
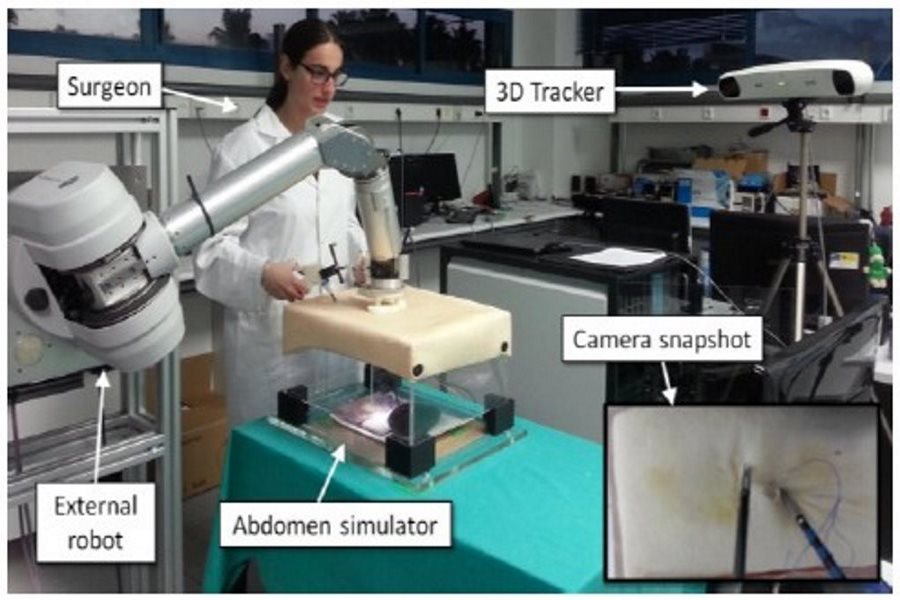
 This proposal aims to tackle the solo-surgery problem through an autonomous robotic system provided with two arms capable of performing autoguided movements. One will be in charge of the laparoscopic camera’s guidance, and another will be used to handle an additional tool. This way, in those interventions where both a main surgeon and an assistant are required, this latter is expected to be substituted thanks to the support of these two arms. This aim will be applied to certain laparoscopic surgery procedures in which the possibility of executing specific manoeuvres in an autonomous mode will be identified by means of sources of sensory feedback.Read more...
This proposal aims to tackle the solo-surgery problem through an autonomous robotic system provided with two arms capable of performing autoguided movements. One will be in charge of the laparoscopic camera’s guidance, and another will be used to handle an additional tool. This way, in those interventions where both a main surgeon and an assistant are required, this latter is expected to be substituted thanks to the support of these two arms. This aim will be applied to certain laparoscopic surgery procedures in which the possibility of executing specific manoeuvres in an autonomous mode will be identified by means of sources of sensory feedback.Read more...Autonomous robot for Minimally Invasive Surgery
 This project is focused on the latest line carried out by the applicant team of researchers in the field of solo-surgery on the framework of minimally invasive surgery. This line of research is devoted to the total substitution of the human assistant by a robot during the intervention, so that this latter can help in the surgical procedure in direct interaction with the surgeon. This kind of systems must have the versatility required in both the communication system with the machine and in the kind of movements so that the surgeon gets the feeling of being as comfortable as it is with the human assistant.Read more...
This project is focused on the latest line carried out by the applicant team of researchers in the field of solo-surgery on the framework of minimally invasive surgery. This line of research is devoted to the total substitution of the human assistant by a robot during the intervention, so that this latter can help in the surgical procedure in direct interaction with the surgeon. This kind of systems must have the versatility required in both the communication system with the machine and in the kind of movements so that the surgeon gets the feeling of being as comfortable as it is with the human assistant.Read more...Robotized Platform for assistance in NOTES/SILS techniques
 Design and development of a robotic platform capable of placing a microrobot equipped with sensors and surgical tools within the abdominal cavity to work collaboratively with the surgeon. The system will be programmable off-line to establish a master plan for use during the operation and in intraoperatively via a human-machine multimodal interface. On the other hand, the robotic system itself consists of two positioner arms and a micro-robot. The two arms, by use of magnetic fields, will move and position the micro-robot in the operative field inside the abdomen. As a configuration of one of the robotic positioner arms, we have considered a hyper-redundant structure that will hold the micro-robot at one end for entry into the abdominal cavity.Read more...
Design and development of a robotic platform capable of placing a microrobot equipped with sensors and surgical tools within the abdominal cavity to work collaboratively with the surgeon. The system will be programmable off-line to establish a master plan for use during the operation and in intraoperatively via a human-machine multimodal interface. On the other hand, the robotic system itself consists of two positioner arms and a micro-robot. The two arms, by use of magnetic fields, will move and position the micro-robot in the operative field inside the abdomen. As a configuration of one of the robotic positioner arms, we have considered a hyper-redundant structure that will hold the micro-robot at one end for entry into the abdominal cavity.Read more...
Collaborative robotized system for hand assisted laparoscopic surgery
 Robotic system for HALS procedures by using the concept of co-worker robot, where the manipulator works side by side with the surgeon, collaborating during the surgical maneuvers and learning from practice. Thus, experience is expected to improve robot’s assistance and to make the system able to detect emergency situations. To that goal, the system will be composed of a manipulator able to handle both an articulated laparoscopic tool and an endoscope, and another arm specialized in the control motion of miniature robots inside the abdominal cavity. On the other hand, the system will include a human-machine interface based on a smart surgical glove, and it will also emulate the concept of “transparent abdomen” by combining real images with augmented reality. Read more...
Robotic system for HALS procedures by using the concept of co-worker robot, where the manipulator works side by side with the surgeon, collaborating during the surgical maneuvers and learning from practice. Thus, experience is expected to improve robot’s assistance and to make the system able to detect emergency situations. To that goal, the system will be composed of a manipulator able to handle both an articulated laparoscopic tool and an endoscope, and another arm specialized in the control motion of miniature robots inside the abdominal cavity. On the other hand, the system will include a human-machine interface based on a smart surgical glove, and it will also emulate the concept of “transparent abdomen” by combining real images with augmented reality. Read more...
BROCA: The Surgical Robot Platform
 The BROCA Project deals with the design and development of a new concept of a surgical robotic system which will manage to democratize robotic surgery. It is the first project in the framework of the Spanish public Pre-Commercial Pro-curement -in the biomedical field- promoted in Spain. Specifically, engineers from the University of Cordoba work on the image analysis, while professionals of six surgical specialties from the Hospital take care of the requirements and final trials. The technical tasks to build up the robotic arms were subcontracted to Tecnalia and its partner Medical Robotics group from the University of Malaga. The integration between the technical partners and the surgeons' team since the beginning of the project allowed the robot to certainly meet their expectations for the sake of the patients.
The BROCA Project deals with the design and development of a new concept of a surgical robotic system which will manage to democratize robotic surgery. It is the first project in the framework of the Spanish public Pre-Commercial Pro-curement -in the biomedical field- promoted in Spain. Specifically, engineers from the University of Cordoba work on the image analysis, while professionals of six surgical specialties from the Hospital take care of the requirements and final trials. The technical tasks to build up the robotic arms were subcontracted to Tecnalia and its partner Medical Robotics group from the University of Malaga. The integration between the technical partners and the surgeons' team since the beginning of the project allowed the robot to certainly meet their expectations for the sake of the patients.
Collaborative robotic system for brain-shift corrections in Neurosurgical Endoscopic Endonasal applications
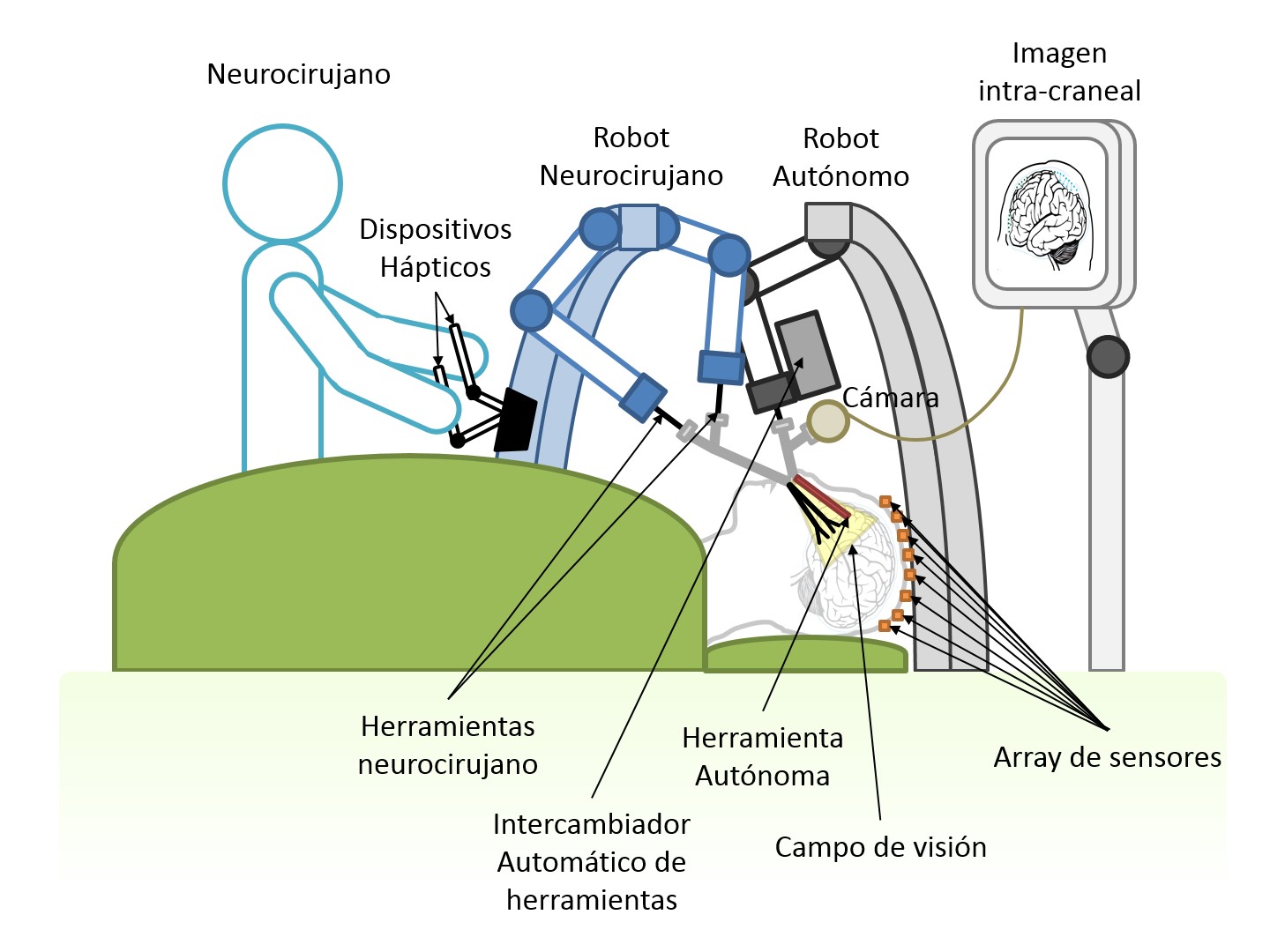 This proposal addresses the subject of developing a co-worker robotic system for minimally invasive neurosurgery, under a learning cognitive scheme. The system will provide assistance to the neurosurgeon with automatic, collaborative or shared-control behaviours, as well as with augmented reality. The robotic system will be adapted to the ergonomy of the intervention, and it will perform an accurate navigation based on the on-line information provided to meassure the brain-shift phenomena and the pre-operative planification. Additionally, it will incorporate an automatic surgical tools interchanger. Read more...
This proposal addresses the subject of developing a co-worker robotic system for minimally invasive neurosurgery, under a learning cognitive scheme. The system will provide assistance to the neurosurgeon with automatic, collaborative or shared-control behaviours, as well as with augmented reality. The robotic system will be adapted to the ergonomy of the intervention, and it will perform an accurate navigation based on the on-line information provided to meassure the brain-shift phenomena and the pre-operative planification. Additionally, it will incorporate an automatic surgical tools interchanger. Read more...

After content body

