
beforecontenttitle
Infrastructure
After content title
Before content body
Chunks
Chunks
 | Stäubli RX 60The 6 DOF industrial robot arm allows for greater flexibility and can perform a wider variety of applications. It can rotate freely in a circular motion. It has a three-phase power controller. It has a maximum Cartesian velocity of 1.8 m/s and a repetition accuracy of 0.02 mm. It features a nominal load-bearing capacity of 2.5 kg and the licensed programming language Staubli Val. |
 | Sensable Phantom DesktopThis haptic device allows for precise tracking of position and orientation. Its special feature relies on the fact that it can provide force feedback in three Cartesian axes in order to receive actions in a remote manner. The nominal position resolution is of 0.023 mm whereas its nominal work force is of 8 N. The Phantom Desktop integrates a C language library. Thanks to this platform, the programs can be used in any other compatible development environment. |
 | Mitsubishi PA-10 7CEThe 7 DOF industrial robot arm can reach any position and at any orientation within a wider range of articulated formats. It features a reach of 1370 mm and a max load-bearing capacity of 10 kg. The controller is connected to a PCI-card through an optical fiber cable and a sampling rate of 1ms. The robot integrates a C language library. Thanks to this platform, the programs can be used in any other compatible development environment. |
 | NDI Polaris SpectraIt is an optical measurement system. This device is able to determine the position and orientation of markers within a specific measurement volume. In order to do so, it emits an infrared light at a max 60 HZ refresh rate, detecting the reflected light from the markers affixed on the surgical equipment. The maximum tracking error can be estimated to be 0.6 mm, 0.35 mm in case the markers are not found on the field of view limit. The sensor can be programmed using a serial port thanks to the fact that the USB controller applies a capacitor to emulate its behaviour. Thus, almost any programming languages are possible to be used on the market (C/C++, Matlab ...). |
 | Laparoscopic systemThe laparoscopic system available at our facilities includes a laparoscopic tower containing a surgery monitor, a cold light generator and a camera. Furthermore, the system includes a power supply and an electric scalpel device activated by foot pedals. Finally, the closing component of this system is a patient simulator in which simulated tissues and organs can be added in order to carry out in-vitro experiments. |
 | CAE LaparoscopyVRThis laparoscopic simulator allows the user to simulate real-time surgical operations for minimally invasive surgery. In order to do so, a virtual environment is created in which the surgeon can interact through haptic devices that emulate the laparoscopic tools and camera. The system collects the operation data that are subsequently used for submitting an evaluation about the efficacy and time employed to accomplish the surgical procedure. |
 | Barret WAMThe 7 DOF WAM arm is a highly dexterous manipulator possessing a great flexibility and lightness. It is the only arm in the world with direct-drive capability so its control of contact forces is robust. The arm incorporates the Puck technology (breakthrough technology in precision motor control).The patented Puck is a self-contained, high-performance brushless servo amplifier with integral power supplies. The servo-electric technology is extremely small (43 g) and energetically very efficient. In fact, an entire 4 DOF WAM arm draws only 28 watts –not enough to power a light bulb-further enhancing inherent safety. |
 | Robotnik Modular ArmIt is an energy saving robot arm with 6 DOF based on the Schünk Group. The external connection of the arm is reduced to just 24 VDC power and communication via CAN bus at a 1ms refresh rate. The arm features a reach of 1300 mm and a max load-bearing capacity of 9 kg. The motors programming is managed through a DLL library supplied by Schünk; but neither the kinematics incorporation nor the dynamic control are included. |
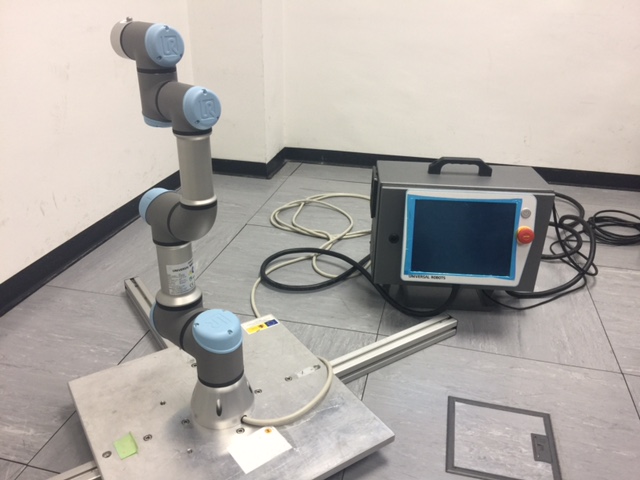 | Universal Robots UR3Robotic arm designed to work together with human operator in factories. This low-dimension manipulator is provided by 6 DOFs, a nominal load of 3 kg and a maximum working radius as low as 500 mm, where it may displace by consuming a nominal power of 100W. Its size is suitable for tasks focused on a limited workspace. Besides this, its main and unique feature related to its competitors consists of allowing an infinite rotation of its last axis. This ability confers unique capabilities to manipulate teleoperated laparoscopic tools, as it may orientate the distal tip without mechanical restrictions. The robot is connected to a controller box that can be managed by a touch screen, although it can be also be accesed by ethernet. Controller box also has 16 digital I/O and 2 analogical I/O, whereas the end effector includes a connector which provides power (maximum of 600 mA) and 2 digital I/O. |
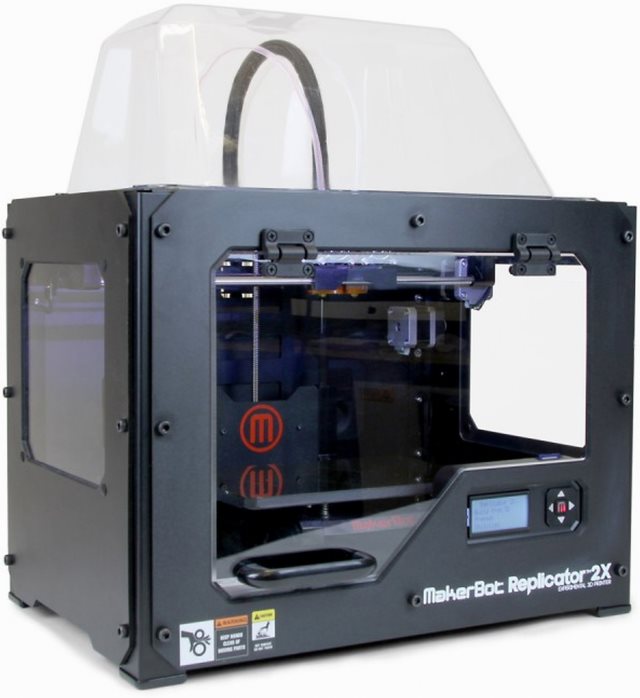 | Makerbot Replicator 2XFuse Deposition Modeling 3D printer which uses ABS filament with a maximum resolution of 0.1 mm, which is used for creating fast prototypes modeled with a specialized 3D software. Its double nozzles allows the use of up to 2 materials with different type/color to combine them in more complex prototypes. |

After content body

