Publications
 | Multi-stage warm started optimal motion planning for over-actuated mobile platforms Gonzalo J Paz-Delgado, Carlos J Pérez-del-Pulgar, Martin Azkarate, Frank Kirchner, Alfonso García-Cerezo |
| This work presents a computationally lightweight motion planner for over-actuated platforms. For this purpose, a general state-space model for mobile platforms with several kinematic chains is defined, which considers dynamics, nonlinearities and constraints. The proposed motion planner is based on a sequential multi-stage approach that takes advantage of the warm start on each step. Firstly, a globally optimal and smooth 2D/3D trajectory is generated using the Fast Marching Method. This trajectory is fed as a warm start to a sequential linear quadratic regulator that is able to generate an optimal motion plan without constraints for all the platform actuators. Finally, a feasible motion plan is generated considering the constraints defined in the model. In this respect, the sequential linear quadratic regulator is employed again, taking the previously generated unconstrained motion plan as a warm start. The motion planner has been deployed into the Exomars Testing Rover of the European Space Agency. This rover is an Ackermann-capable planetary exploration testbed that is equipped with a robotic arm. Several experiments were carried out demonstrating that the proposed approach speeds up the computation time and increases the success ratio for a martian sample retrieval mission, which can be considered as a representative use case of goal-constrained trajectory generation for an over-actuated mobile platform. | |
| Gonzalo J Paz-Delgado, J Ricardo Sánchez-Ibáñez, RAÚL Domínguez, Carlos J Pérez-Del-Pulgar, Frank Kirchner, Alfonso García-Cerezo |
A highly restricted workspace of the robotic arm may hinder to perform safely any autonomousmobile manipulation task with planetary exploration rovers. To ensure mission safety as well as highefficiency, a coupled path and motion planner for mobile manipulation is presented in this work. First, a FastMarching Method based path planner generates a safe trajectory to reach the goal vicinity, avoiding obstaclesand non-traversable areas in the scenario. The path planner is able to control the final rover orientation toensure that the goal is finally reachable by the arm. Second, a 3D Fast Marching Method based motionplanner generates the arm joints motion profile, by creating a 3D tunnel-like cost volume surrounding thealready computed rover base trajectory. This tunnel makes use of an offline-computed safe workspace ofthe manipulator, thus ensuring that no self-collision will occur during the planned motion. The presentedalgorithm has been tested with multiple simulation experiments, benchmarked with an off-the-shelf motionplanning library, and validated in a field test campaign with the rover SherpaTT of DFKI Robotics InnovationCenter. The tests consisted in SherpaTT approaching an interesting area on the scenario and performing amobile manipulation sample scanning operation. These experiments have demonstrated that the proposedmotion planner increases efficiency as well as ensures mission safety. This is thanks to, on the one hand,a coordinated base-arm movement that results in maximized efficiency in time terms, and, on the otherhand, considering the manipulator workspace offline in the mobile manipulation motion planner to guaranteeself-collision avoidance. | |
 | Castilla-Arquillo, R., Pérez-del-Pulgar, C. J., Paz-Delgado, G. J., & Gerdes, L. |
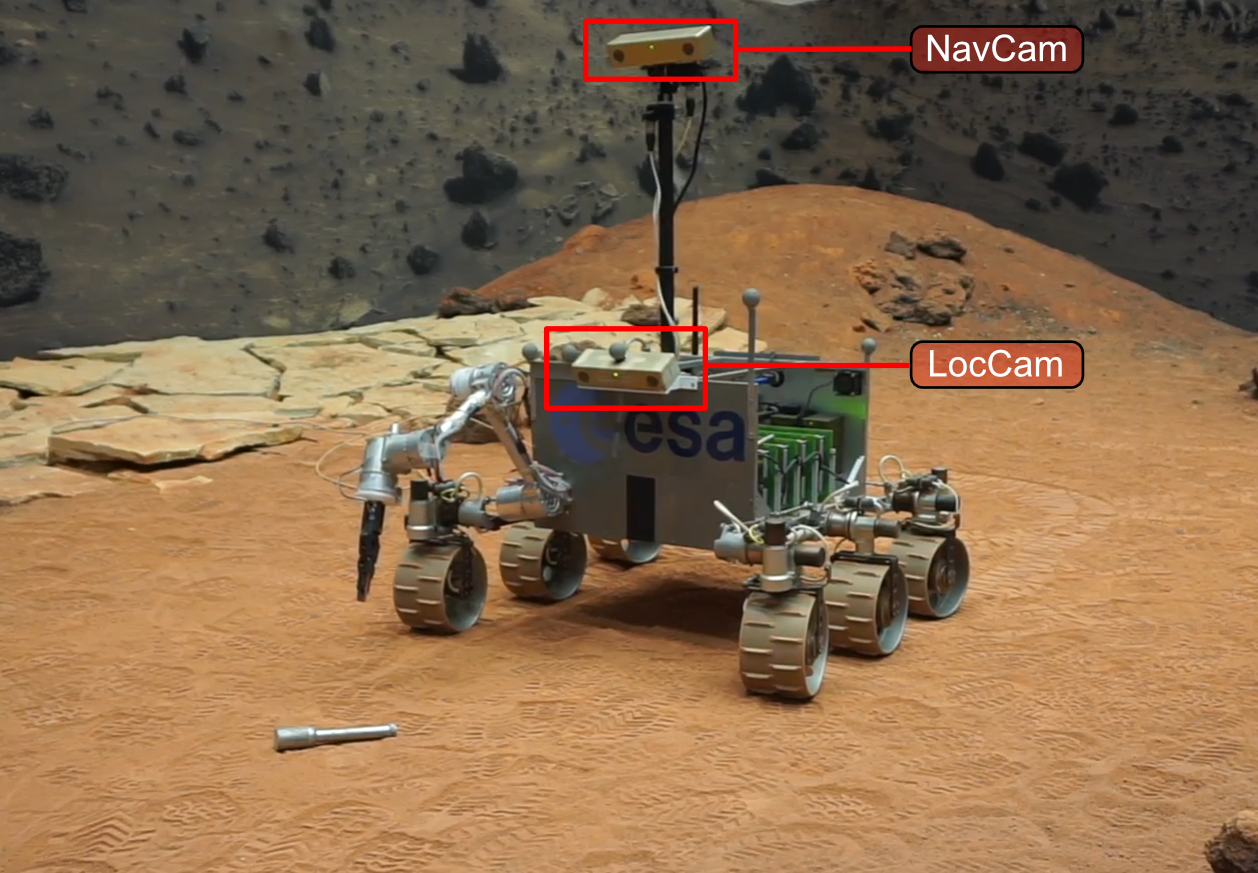
| The goal of the Mars Sample Return campaign is to collect soil samples from the surface of Mars and return them to Earth for further study. The samples will be acquired and stored in metal tubes by the Perseverance rover and deposited on the Martian surface. As part of this campaign, it is expected that the Sample Fetch Rover will be in charge of localizing and gathering up to 35 sample tubes over 150 Martian sols. Autonomous capabilities are critical for the success of the overall campaign and for the Sample Fetch Rover in particular. This work proposes a novel system architecture for the autonomous detection and pose estimation of the sample tubes. For the detection stage, a Deep Neural Network and transfer learning from a synthetic dataset are proposed. The dataset is created from photorealistic 3D simulations of Martian scenarios. Additionally, the sample tubes poses are estimated using Computer Vision techniques such as contour detection and line fitting on the detected area. Finally, laboratory tests of the Sample Localization procedure are performed using the ExoMars Testing Rover on a Mars-like testbed. These tests validate the proposed approach in different hardware architectures, providing promising results related to the sample detection and pose estimation. | |
| Design, Testing, and Evolution of Mars Rover Testbeds: European Space Agency Planetary Exploration Martin Azkarate, Levin Gerdes, Tim Wiese, Martin Zwick, Marco Pagnamenta, Javier Hidalgo Carrio, Pantelis Poulakis, Carlos Perez-del-Pulgar |
This paper presents the system architecture anddesign of two planetary rover laboratory prototypes developedat the European Space Agency (ESA). These research platformshave been developed to provide early prototypes for validation ofdesigns and serve ESA’s Automation & Robotics Lab infrastructureas testbeds for continuous research and testing. Both rovershave been built considering the constraints of Space Systemswith the sufficient level of representativeness to allow rapidprototyping. They avoid strictly space-qualified components anddesigns that present a major cost burden and frequently lackthe flexibility or modularity that the lab environment requiresfor its investigations. This design approach is followed for all themechanical, electrical, and software aspects of the system. In thispaper, two ExoMars mission-representative rovers, the ExoMarsTesting Rover (ExoTeR) and the Martian Rover Testbed forAutonomy (MaRTA), are thoroughly described. The lessons learntand experience gained while running several research activitiesand test campaigns are also presented. Finally, the paper aims toprovide some insight on how to reduce the gap between lab R&Dand flight implementation by anticipating system constraintswhen building and testing these platforms. | |
 | Path Planning for Autonomous Mobile Robots: A Review José Ricardo Sánchez-Ibáñez, Carlos J Pérez-del-Pulgar, Alfonso García-Cerezo |
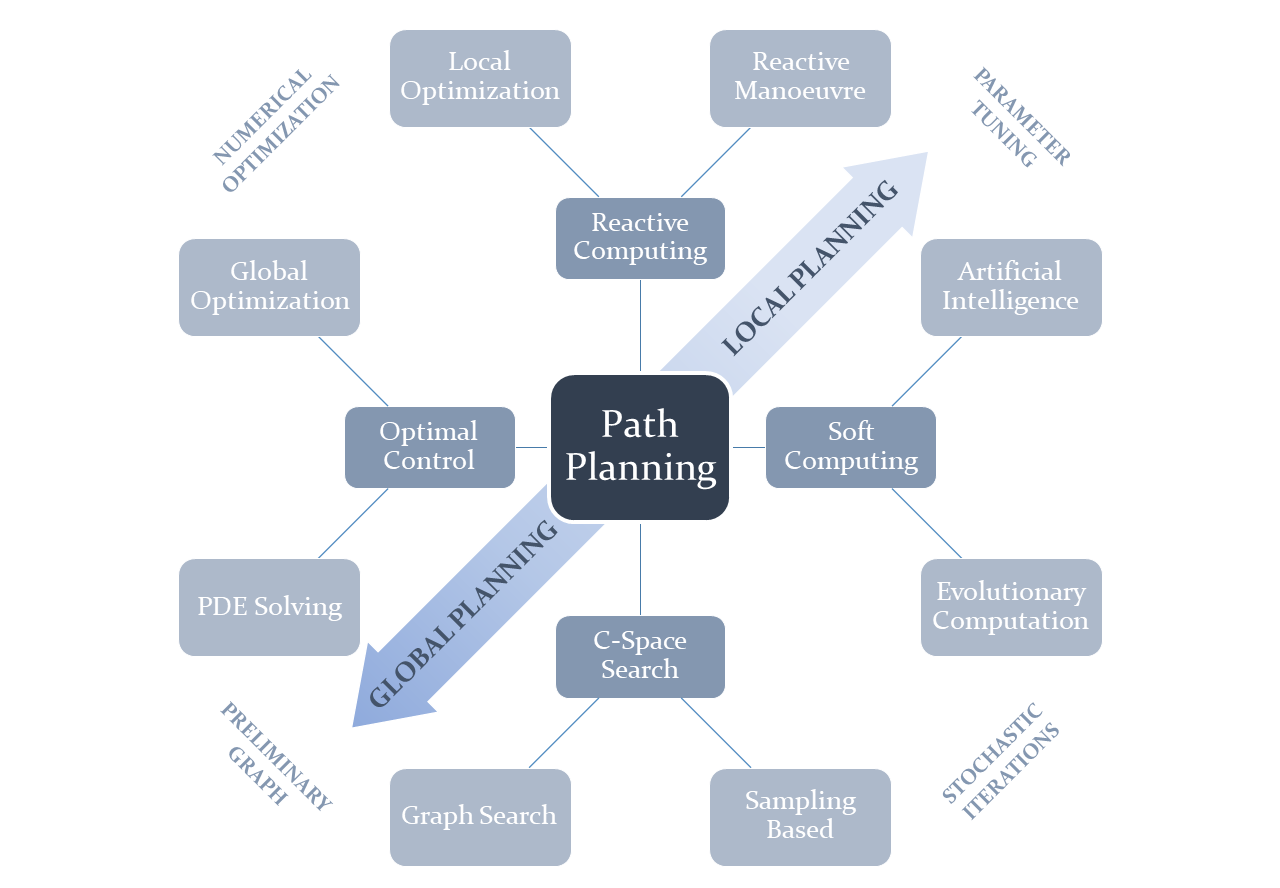
| Providing mobile robots with autonomous capabilities is advantageous. It allows one to dispense with the intervention of human operators, which may prove beneficial in economic and safety terms. Autonomy requires, in most cases, the use of path planners that enable the robot to deliberate about how to move from its location at one moment to another. Looking for the most appropriate path planning algorithm according to the requirements imposed by users can be challenging, given the overwhelming number of approaches that exist in the literature. Moreover, the past review works analyzed here cover only some of these approaches, missing important ones. For this reason, our paper aims to serve as a starting point for a clear and comprehensive overview of the research to date. It introduces a global classification of path planning algorithms, with a focus on those approaches used along with autonomous ground vehicles, but is also extendable to other robots moving on surfaces, such as autonomous boats. Moreover, the models used to represent the environment, together with the robot mobility and dynamics, are also addressed from the perspective of path planning. Each of the path planning categories presented in the classification is disclosed and analyzed, and a discussion about their applicability is added at the end. | |
 | Efficient Autonomous Navigation for Planetary Rovers with Limited Resources Levin Gerdes, Martin Azkarate, José Ricardo Sánchez Ibáñez, Luc Joudrier, Carlos Jesus Perez-del-Pulgar-Mancebo |
Rovers operating on Mars require more and more autonomous features to fulfill their challenging mission requirements. However, the inherent constraints of space systems render the implementation of complex algorithms an expensive and difficult task. In this paper, we propose an architecture for autonomous navigation. Efficient implementations of autonomous features are built on top of the ExoMars path following navigation approach to enhance the safety and traversing capabilities of the rover. These features allow the rover to detect and avoid hazards and perform significantly longer traverses planned by operators on the ground. The efficient navigation approach has been implemented and tested during field test campaigns on a planetary analogue terrain. The experiments evaluated the proposed architecture by autonomously completing several traverses of variable lengths while avoiding hazards. The approach relies only on the optical Localization Cameras stereo bench, a sensor that is found in all current rovers, and potentially allows for computationally inexpensive long‐range autonomous navigation in terrains of medium difficulty. | |
 | Dynamic path planning for reconfigurable rovers using a multi-layered grid J Ricardo Sánchez-Ibánez, Carlos J Pérez-del-Pulgar, Martin Azkarate, Levin Gerdes, Alfonso García-Cerezo Github: https://github.com/spaceuma/ARES-DyMu_python
|
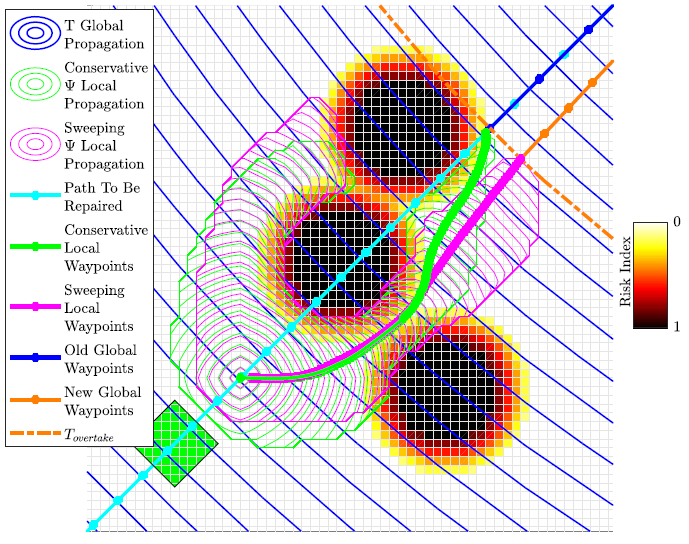
| Autonomy on rovers is desirable in order to extend the traversed distance, and therefore, maximize the number of places visited during the mission. It depends heavily on the information that is available for the traversed surface on other planet. This information may come from the vehicle’s sensors as well as from orbital images. Besides, future exploration missions may consider the use of reconfigurable rovers, which are able to execute multiple locomotion modes to better adapt to different terrains. With these considerations, a path planning algorithm based on the Fast Marching Method is proposed. Environment information coming from different sources is used on a grid formed by two layers. First, the Global Layer with a low resolution, but high extension is used to compute the overall path connecting the rover and the desired goal, using a cost function that takes advantage of the rover locomotion modes. Second, the Local Layer with higher resolution but limited distance is used where the path is dynamically repaired because of obstacle presence. Finally, we show simulation and field test results based on several reconfigurable and non-reconfigurable rover prototypes and a experimental terrain. | |
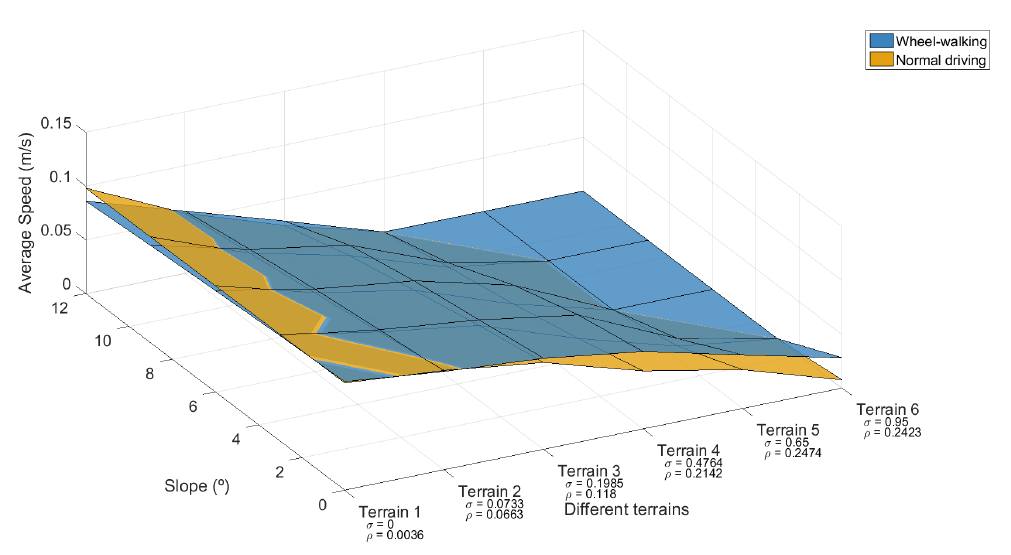 | Choosing the Best Locomotion Mode in Reconfigurable Rovers Carlos Jesús Pérez del Pulgar Mancebo, Pablo Romeo Manrique, Gonzalo Jesús Paz Delgado, José Ricardo Sánchez Ibáñez, Martin Azkarate Github: https://github.com/spaceuma/ExoTer-Model-Locomotion-planning |
The use of autonomous rovers for planetary exploration is crucial to traverse long distances and perform new discoveries on other planets. One of the most important issues is related to the interaction between the rover wheel and terrain, which would help to save energy and even avoid getting entrapped. The use of reconfigurable rovers with different locomotion modes has demonstrated improvement of traction and energy consumption. Therefore, the objective of this paper is to determine the best locomotion mode during the rover traverse, based on simple parameters, which would be obtained from propioceptive sensors. For this purpose, interaction of different terrains have been modelled and analysed with the ExoTeR, a scale prototype rover of the European ExoMars 2020 mission. This rover is able to perform, among others, the wheel walking locomotion mode, which has been demonstrated to improve traction in different situations. Currently, it is difficult to decide the instant time the rover has to switch from this locomotion mode to another. This paper also proposes a novel method to estimate the slip ratio, useful for deciding the best locomotion mode. Finally, results are obtained from an immersive simulation environment. It shows how each locomotion mode is suitable for different terrains and slopes and the proposed method is able to estimate the slip ratio. | |

 | Observation of inverse Compton emission from a long γ-ray burst Peter Veres, PN Bhat, MS Briggs, WH Cleveland, R Hamburg, CM Hui, B Mailyan, ..., M.D. caballero-García, I.M. Carrasco, A. Castellón, N. Catro Segura, A.J. Castro-Tirado, ... , C.J. Pérez del Pulgar, ... Nature, 575, 459-463. Springer, 2019. |
| Long-duration γ-ray bursts (GRBs) originate from ultra-relativistic jets launched from the collapsing cores of dying massive stars. They are characterized by an initial phase of bright and highly variable radiation in the kiloelectronvolt-to-megaelectronvolt band, which is probably produced within the jet and lasts from milliseconds to minutes, known as the prompt emission1,2. Subsequently, the interaction of the jet with the surrounding medium generates shock waves that are responsible for the afterglow emission, which lasts from days to months and occurs over a broad energy range from the radio to the gigaelectronvolt bands1,2,3,4,5,6. The afterglow emission is generally well explained as synchrotron radiation emitted by electrons accelerated by the external shock7,8,9. Recently, intense long-lasting emission between 0.2 and 1 teraelectronvolts was observed from GRB 190114C10,11. Here we report multi-frequency observations of GRB 190114C, and study the evolution in time of the GRB emission across 17 orders of magnitude in energy, from 5 × 10−6 to 1012 electronvolts. We find that the broadband spectral energy distribution is double-peaked, with the teraelectronvolt emission constituting a distinct spectral component with power comparable to the synchrotron component. This component is associated with the afterglow and is satisfactorily explained by inverse Compton up-scattering of synchrotron photons by high-energy electrons. We find that the conditions required to account for the observed teraelectronvolt component are typical for GRBs, supporting the possibility that inverse Compton emission is commonly produced in GRBs.
| |
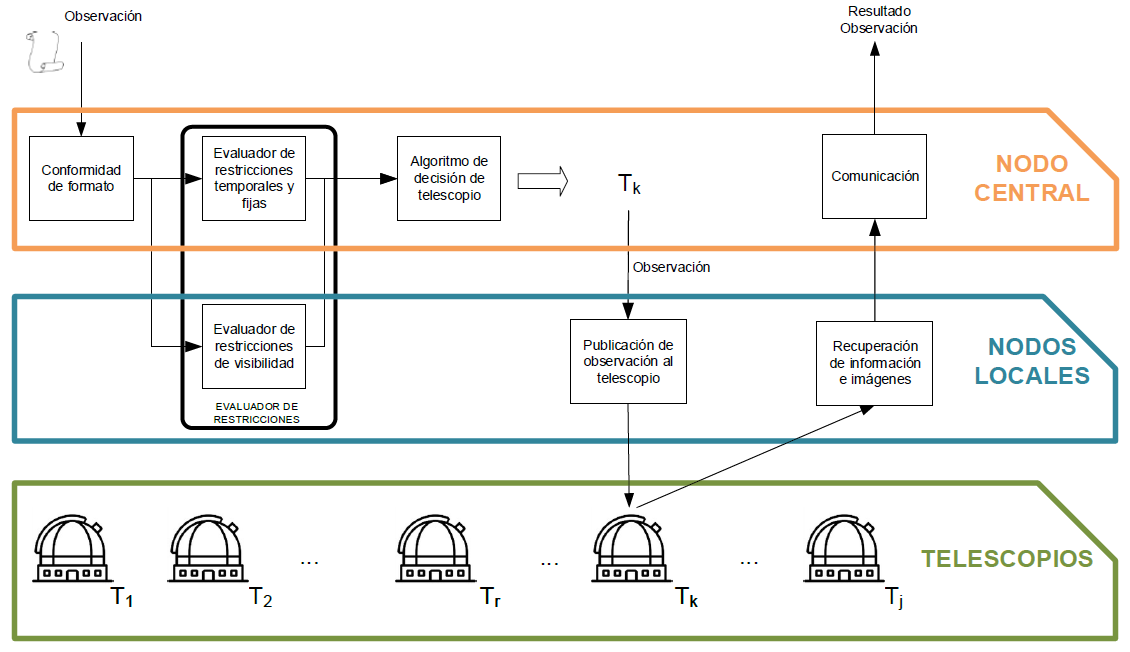
 | Observation scheduling and simulation in a global telescope network Carmen López-Casado, C.J. Pérez-del-Pulgar, Víctor F Muñoz, Alberto J Castro-Tirado Future Generation Computer Systems. 95, pp. 116 - 125. Elsevier, 2019.
|
The use of autonomous rovers for planetary exploration is crucial to traverse long distances and perform new discoveries on other planets. One of the most important issues is related to the interaction between the rover wheel and terrain, which would help to save energy and even avoid getting entrapped. The use of reconfigurable rovers with different locomotion modes has demonstrated improvement of traction and energy consumption. Therefore, the objective of this paper is to determine the best locomotion mode during the rover traverse, based on simple parameters, which would be obtained from propioceptive sensors. For this purpose, interaction of different terrains have been modelled and analysed with the ExoTeR, a scale prototype rover of the European ExoMars 2020 mission. This rover is able to perform, among others, the wheel walking locomotion mode, which has been demonstrated to improve traction in different situations. Currently, it is difficult to decide the instant time the rover has to switch from this locomotion mode to another. This paper also proposes a novel method to estimate the slip ratio, useful for deciding the best locomotion mode. Finally, results are obtained from an immersive simulation environment. It shows how each locomotion mode is suitable for different terrains and slopes and the proposed method is able to estimate the slip ratio. | |
 | GlSch: Planificación de Observaciones en la red de Telescopios GLORIA Revista Iberoamericana de Automática e Informática industrial. 2018 Apr 18. |
Este artículo propone el diseño y desarrollo de un planificador para la red de telescopios GLORIA. Esta red, cuyo principal objetivo es acercar los ciudadanos a la astronomía, está formada por 18 telescopios ubicados en cuatro continentes. Parte de la gestión de esta red se lleva a cabo por el planificador, que se encarga de recibir peticiones de observación de usuarios de usuarios y enviárselas a uno de los telescopios de la red. Para esto, necesita un algoritmo que decida el mejor telescopio, evitando ofrecer una petición a un telescopio que finalmente no pueda ejecutarla. Este artículo presenta dos algoritmos de decisión: el primero se basa únicamente en la predicción meteorológica, y el segundo emplea lógica difusa e información de cada telescopio. Ambos algoritmos fueron implantados en la red GLORIA. Los resultados obtenidos, así como una comparativa del rendimiento de ambos se presenta en este artículo. Así mismo, se detalla la arquitectura del planificador basada en una estructura híbrida distribuida-centralizada. | |
 | Multi-messenger Observations of a Binary Neutron Star Merger Benjamin P Abbott, Richard Abbott, TD Abbott, F Acernese, K Ackley, C Adams, ... ,
|
| |
| Localization and broadband follow-up of the gravitational-wave transient GW150914 Benjamin P Abbott, R Abbott, TD Abbott, MR Abernathy, F Acernese, K Ackley, ... , The Astrophisical Journal Letters, 826 - 1, American Astronomical Society 2016 July 20. |
| A gravitational-wave (GW) transient was identified in data recorded by the Advanced Laser Interferometer Gravitational-wave Observatory (LIGO) detectors on 2015 September 14. The event, initially designated G184098 and later given the name GW150914, is described in detail elsewhere. By prior arrangement, preliminary estimates of the time, significance, and sky location of the event were shared with 63 teams of observers covering radio, optical, near-infrared, X-ray, and gamma-ray wavelengths with ground- and space-based facilities. In this Letter we describe the low-latency analysis of the GW data and present the sky localization of the first observed compact binary merger. We summarize the follow-up observations reported by 25 teams via private Gamma-ray Coordinates Network circulars, giving an overview of the participating facilities, the GW sky localization coverage, the timeline, and depth of the observations. As this event turned out to be a binary black hole merger, there is little expectation of a detectable electromagnetic (EM) signature. Nevertheless, this first broadband campaign to search for a counterpart of an Advanced LIGO source represents a milestone and highlights the broad capabilities of the transient astronomy community and the observing strategies that have been developed to pursue neutron star binary merger events. Detailed investigations of the EM data and results of the EM follow-up campaign are being disseminated in papers by the individual teams. | |
| W Zheng, RF Shen, T Sakamoto, AP Beardmore, M De Pasquale, XF Wu, J Gorosabel, Y Urata, S Sugita, B Zhang, A Pozanenko, M Nissinen, DK Sahu, M Im, TN Ukwatta, M Andreev, E Klunko, A Volnova, CW Akerlof, P Anto, SD Barthelmy, A Breeveld, U Carsenty, S Castillo-Carrión, AJ Castro-Tirado, MM Chester, CJ Chuang, R Cunniffe, A De Ugarte Postigo, R Duffard, H Flewelling, N Gehrels, T Güver, S Guziy, VP Hentunen, KY Huang, M Jelínek, TS Koch, P Kubánek, P Kuin, TA McKay, S Mottola, SR Oates, P O'Brien, M Ohno, MJ Page, SB Pandey, C Pérez del Pulgar, W Rujopakarn, E Rykoff, T Salmi, R Sánchez-Ramírez, BE Schaefer, A Sergeev, E Sonbas, A Sota, JC Tello, K Yamaoka, SA Yost, F Yuan The Astrophysical Journal. 751 - 2, American Astronomical Society, 2012. |
| We present a comprehensive analysis of a bright, long-duration (T 90 ~ 257 s) GRB 110205A at redshift z = 2.22. The optical prompt emission was detected by Swift/UVOT, ROTSE-IIIb, and BOOTES telescopes when the gamma-ray burst (GRB) was still radiating in the γ-ray band, with optical light curve showing correlation with γ-ray data. Nearly 200 s of observations were obtained simultaneously from optical, X-ray, to γ-ray (1 eV to 5 MeV), which makes it one of the exceptional cases to study the broadband spectral energy distribution during the prompt emission phase. In particular, we clearly identify, for the first time, an interesting two-break energy spectrum, roughly consistent with the standard synchrotron emission model in the fast cooling regime. Shortly after prompt emission (~1100 s), a bright (R = 14.0) optical emission hump with very steep rise (α ~ 5.5) was observed, which we interpret as the reverse shock (RS) emission. It is the first time that the rising phase of an RS component has been closely observed. The full optical and X-ray afterglow light curves can be interpreted within the standard reverse shock (RS) + forward shock (FS) model. In general, the high-quality prompt and afterglow data allow us to apply the standard fireball model to extract valuable information, including the radiation mechanism (synchrotron), radius of prompt emission (R GRB ~ 3 × 1013 cm), initial Lorentz factor of the outflow (Γ0 ~ 250), the composition of the ejecta (mildly magnetized), the collimation angle, and the total energy budget. | |



