
La Luna y Marte en 3D: robots espaciales de la UMA recrean el terreno al detalle a partir de fotografías
 1
/
1
1
/
1


Un nuevo sistema de IA más sencillo, rápido y robusto permitirá planificar con mayor precisión futuras exploraciones planetarias
Categoría: Investigación, portada
Un equipo científico del Laboratorio de Robótica Espacial de la Universidad de Málaga ha desarrollado un sistema de inteligencia artificial (IA) capaz de reconstruir el terreno en tres dimensiones a partir de la información y las imágenes captadas por sensores de vehículos espaciales.
Se trata de un sistema con un nivel de detalle que permite la construcción 3D de Marte o la Luna -una reproducción tan fiel que es difícil de distinguir de la imagen real-, permitiendo a los geólogos espaciales planificar con mayor precisión futuras exploraciones planetarias.
De hecho, los investigadores de la UMA, liderados por el profesor del Departamento de Ingeniería de Sistemas y Automática Carlos Pérez del Pulgar, se han desplazado a Bardenas Reales (Navarra) para recopilar un conjunto de datos clave en este entorno -agreste, desértico y lleno de obstáculos-, que sirve como escenario ideal para poner a prueba esta tecnología que viajará en próximas misiones espaciales.
Los resultados obtenidos hasta ahora son “prometedores”: introducen avances significativos respecto a las soluciones actuales. “Es más preciso, más sencillo y requiere menos información, ya que le basta con la secuencia de imágenes recogidas por los vehículos”, afirma Pérez del Pulgar que, además, señala que se apoya en herramientas habituales en la reconstrucción virtual de objetos en 3D.


A la izquierda Carlos Pérez del Pulgar trabajando con el sistema. A la derecha, el rover de la UMA en Bardenas Reales
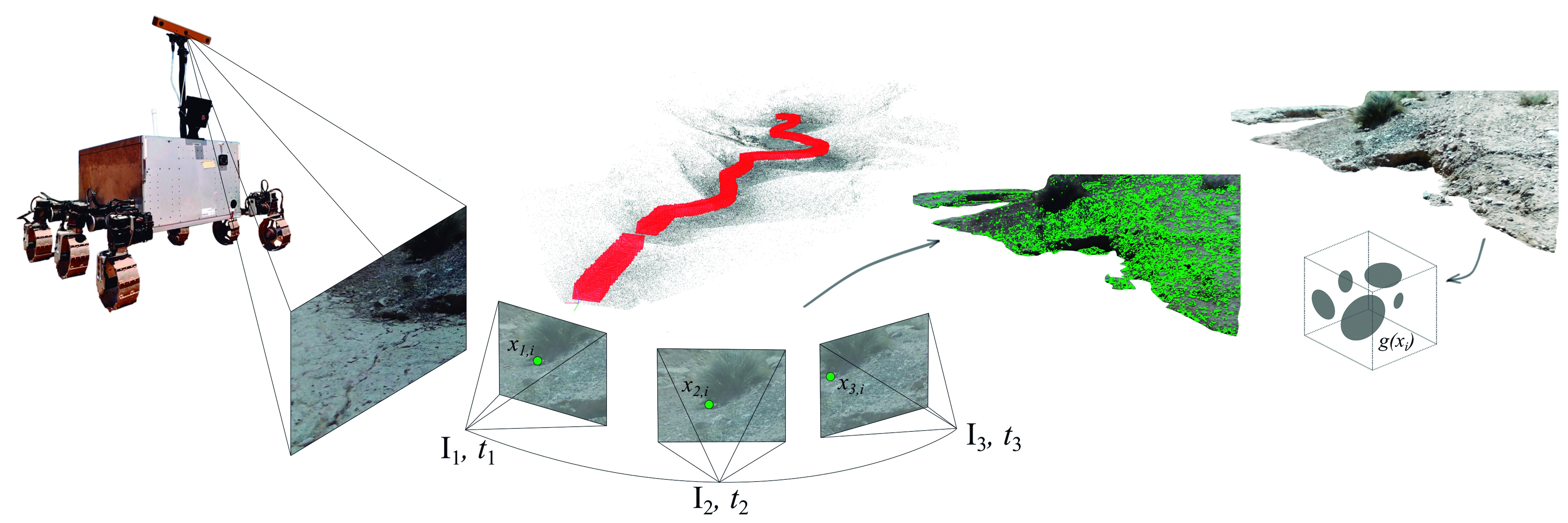
Este investigador de la UMA explica que el único requisito es que las fotografías se tomen muy próximas entre sí, puesto que trabajan con secuencias captadas cada cinco o diez centímetros. “A partir de ahí, el modelo de IA reconstruye la escena en 3D identificando coincidencias entre las imágenes disponibles”.
“Los sistemas actuales utilizan cámaras estéreo que imitan la visión humana, pero solo reconstruyen el entorno inmediato del rover, que abarca una porción muy limitada del terreno. Nuestro método, en cambio, permite reconstruir todo el recorrido del vehículo”, añade el investigador.
Más rápido y robusto: mayor precisión
En suma, un sistema más rápido y, sobre todo, más robusto frente a las dificultades del entorno. Pese a ello, aún quedan retos por resolver. El primero es el coste computacional: aunque más eficiente que otras alternativas, el método sigue requiriendo una elevada capacidad de cálculo, lo que obliga a realizar el procesamiento en la Tierra y no a bordo del rover. El segundo desafío es la dependencia de la fase inicial de reconstrucción geométrica, si esta falla, todo el procesamiento posterior se ve comprometido.

Imágenes reales y reproducciones del terreno obtenidas con esta técnica



