
Robots olfativos: La UMA investiga cómo localizar fuentes de gas en entornos reales
 1
/
1
1
/
1


Una tesis doctoral avanza en la solución a un problema complejo y con aplicaciones reales
Categoría: Investigación, portada
¿Cómo puede un robot encontrar el origen de una fuga de gas? Esa es la pregunta que ha guiado la investigación de José Ojeda Morala, quien acaba de defender su tesis doctoral en el Programa de Doctorado en Ingeniería Mecatrónica de la Universidad de Málaga, con la calificación de Sobresaliente con Mención Cum Laude.
Su trabajo se ha desarrollado en el Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos (IMECH.UMA), bajo la dirección de los profesores Javier González Jiménez y Javier Monroy, del grupo de Percepción Artificial y Robótica Inteligente (MAPIR).

José Ojeda, durante la defensa de su tesis
La investigación avanza en la solución a un problema complejo y con aplicaciones muy reales: conseguir que un robot móvil, equipado con sensores de gas y de viento (anemómetro), sea capaz de detectar de forma autónoma y precisa el punto desde donde se está emitiendo un gas. Para ello, se enfrentan fenómenos difíciles de modelar, como la dispersión del gas en el aire, un proceso que depende de múltiples factores y se estudia desde la dinámica de fluidos.
Ante esa complejidad, la investigación adopta un enfoque basado en la robótica probabilística, una rama que aplica herramientas matemáticas para que los robots puedan razonar bajo incertidumbre, interpretando datos incompletos o imprecisos. En concreto, el trabajo desarrolla modelos bayesianos, que permiten al robot ir actualizando su estimación sobre la localización de la fuente de gas a medida que recoge nueva información de sus sensores.
Mejorar la vida de las personas
El resultado de esta tesis es consecuencia del objetivo de su autor, José Ojeda, de desarrollar tecnología que pueda marcar una diferencia tangible en la vida de las personas. “Ver el potencial de estos robots para actuar en emergencias o en control ambiental es altamente gratificante”, señaló al término de su defensa.
Sus directores de tesis consideran que su trabajo es un claro ejemplo del talento y la capacidad de innovación que se desarrolla en la UMA. “Su enfoque en la robótica probabilística es clave para superar los desafíos en la detección y localización autónoma de emisiones de gases”, señalan.
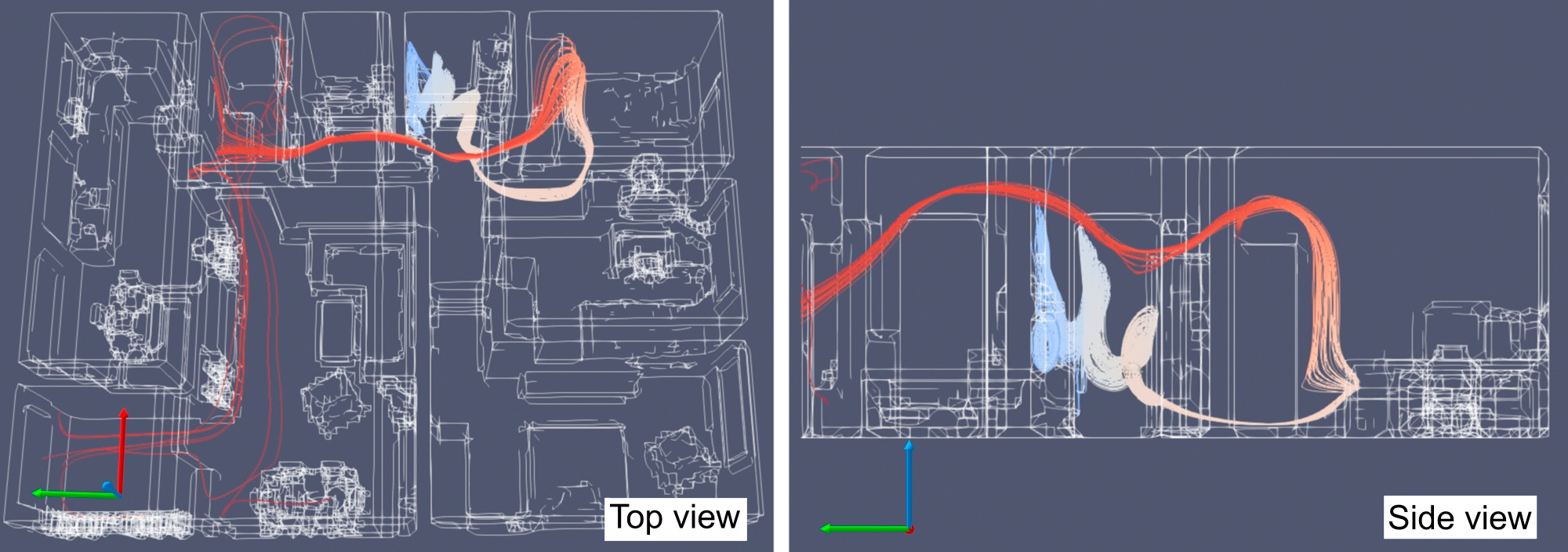
Representación tridimensional (izqda.) y lateral (dcha.) del flujo gaseoso en una vivienda
Esta investigación contribuye al desarrollo de robots capaces de actuar en situaciones reales de emergencia, control ambiental o seguridad, combinando modelos físicos, matemáticos y probabilísticos para mejorar su toma de decisiones.
Para más información sobre las líneas de investigación del Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos, se puede visitar la web del IMECH-UMA.
Demostración en vídeo



