Navegación autónoma de un robot móvil 4x4
Proyecto de Investigación de Excelencia de la Junta de Andalucía P10-TEP-6101-R
Departamento de Ingeniería de Sistemas y Automática
Navegación autónoma de un robot móvil 4x4 en entornos naturales mediante GPS diferencial y telémetro láser tridimensional
Autonomous navigation of a 4x4 mobile robot in natural environments using differential GPS and a 3D laser rangefinder
Duración: del 26 de Marzo de 2013 hasta 25 de Marzo de 2017.
Duration: from March 26, 2013 until March 25, 2017.
Resumen:
La navegación autónoma de robots móviles en entornos naturales resulta mucho más compleja que sobre entornos artificiales, ya que estos últimos sí están preparados para la circulación de personas o vehículos. En este proyecto de investigación se pretende alcanzar la navegación autónoma de un pequeño robot móvil 4x4 en entornos naturales a baja velocidad. Para ello, además de GPS, inclinómetros, giróscopos y odometría, el vehículo cuenta con un telémetro láser 3D.
Summary:
Autonomous navigation of mobile robots in natural environments is much more complex than in an artificial one, since the latter is already prepared for the movement of people or vehicles. This research project seeks to achieve autonomous navigation of a small 4x4 mobile robot in natural terrains at low speed. For this purpose, the vehicle employs odometry, gyroscopes, inclinometers, GPS and a 3D laser rangefinder.
El robot móvil Andábata:
Se ha construido un pequeño robot móvil alimentado con baterías para la navegación en exteriores denominado Andábata. Un andábata era un gladiador que peleaba cubierta la cabeza con un casco que le tapaba los ojos. Este nombre hace alusión a los difíciles retos que plantea el movimiento de un vehículo autónomo en entornos naturales.
Andábata se desplaza mediante tracción con deslizamiento (skid-steering) de cuatro ruedas de 20 cm de diámetro. Cada rueda posee su propio motor con codificador, una reductora, y un sistema de suspensión pasiva con dos muelles y una guía lineal de 6.5 cm de recorrido. El robot tiene tres niveles: el inferior para las baterías, el intermedio para la electrónica y la computadora, y el superior para los sensores.
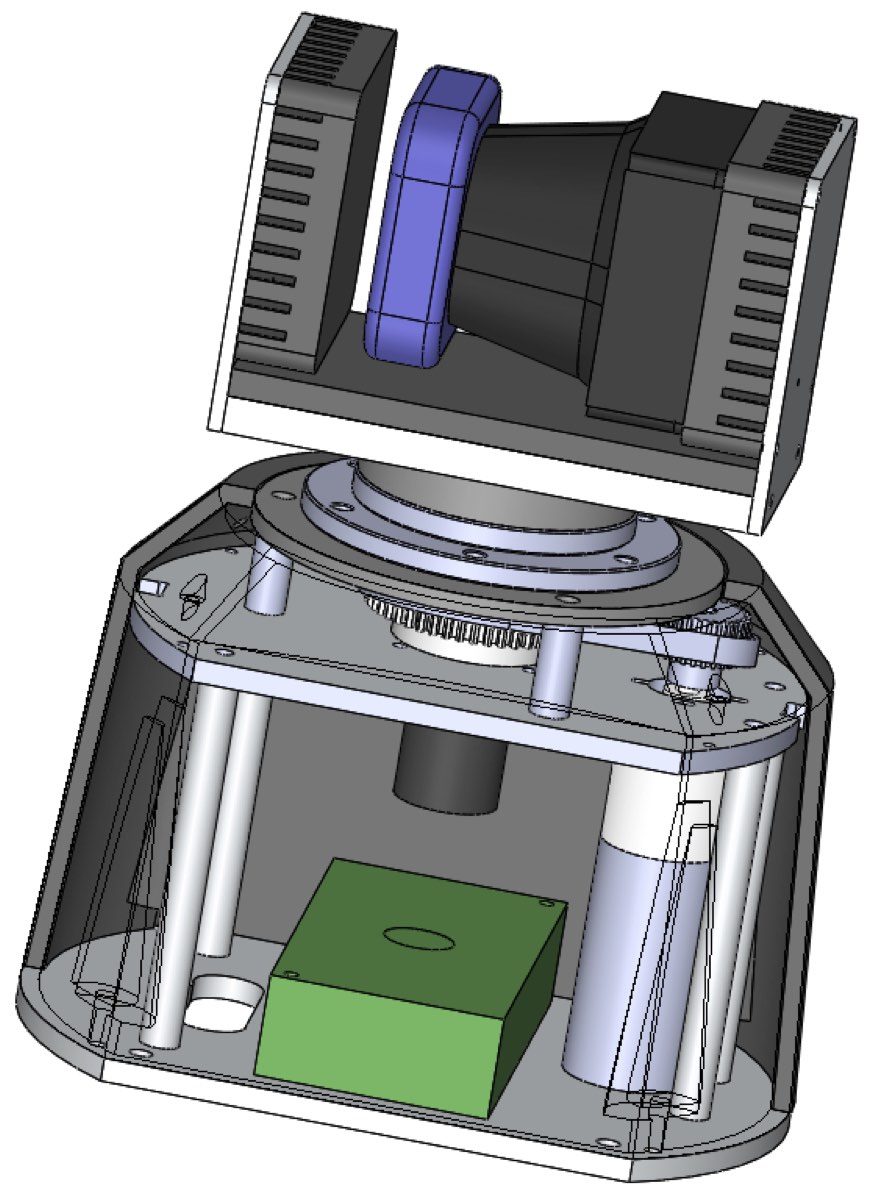
Andábata cuenta con un teléfono móvil para obtener datos de su GPS, inclinómetros, giróscopos y magnetómetros. El teléfono también envía imágenes de vídeo para la supervisión remota del robot mediante un enrutador WiFi a bordo del vehículo. Además, se ha diseñado un telémetro láser 3D a partir de un Hokuyo UTM-30LX-EW para proporcionar al robot información del entorno cercano.
The mobile robot Andabata:
It has built a small mobile robot powered with batteries for outdoor navigation called Andabata. An andabata was a gladiator that wore a helmet without any aperture for the eyes, so that he was obliged to fight blindfold. This name refers to the difficult challenges posed by the movement of an autonomous vehicle in natural environments.
Andabata consists of a skid-steered vehicle with four wheels of 20 cm in diameter. Each wheel has its own motor with encoder, a gearbox, and a passive suspension system with two springs and a linear guide with a stroke of 6.5 cm. The robot has three levels: the lower for the batteries, the intermediate for electronics and the computer, and the upper for the sensors.
Andabata has a smart phone with GPS, inclinometers, gyroscopes and magnetometers. The phone also sends video through a WiFi router onboard the vehicle for remote supervision. In addition, a 3D laser scanner based on a Hokuyo UTM-30LX-EW rangefinder has been designed to provide data of the nearby environment.

Publicaciones
Publications
- “Navigability Analysis of Natural Terrains with Fuzzy Elevation Maps from Ground-based 3D Range Scans”, Jorge L. Martínez, Anthony Mandow, Antonio Reina, Tomás J. Cantador, Jesús Morales and Alfonso García-Cerezo, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 1576-1581, 2013, Tokyo, Japan.
Slides IROS_13.pdf
http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6696559&tag=1
- "Improving 3D Scan Matching Time of the Coarse Binary Cubes Method with Fast Spatial Subsampling”, Jesús Morales, Jorge L. Martínez, Anthony Mandow, Antonio J. Reina, Javier Serón and Alfonso García-Cerezo. 39th Annual Conference of the IEEE Industrial Electronics Society (IECON), pp. 4166-4171, 2013, Vienna, Austria.
Slides IECON_13.pdf
http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6699804&tag=1
- “Collapsible Cubes: Removing Overhangs from 3D Point Clouds to Build Local Navigable Elevation Maps”, Antonio J. Reina, Jorge L. Martínez, Anthony Mandow, Jesús Morales, and Alfonso García-Cerezo, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), pp. 1012-1017, 2014, Besancon, France.
Slides AIM_14.pdf
http://ieeexplore.ieee.org/xpl/login.jsp?tp=&arnumber=6878213&tag=1
- “Boresight Calibration of Construction Misalignments for 3D Scanners Built with a 2D Laser Rangefinder Rotating on its Optical Center”, Jesús Morales, Jorge L. Martínez, Anthony Mandow, Antonio J. Reina, Alejandro Pequeño-Boter, and Alfonso García-Cerezo, Sensors, Vol. 14 (11), pp. 20025-20040, 2014.
http://www.mdpi.com/1424-8220/14/11/20025
- “Motion Detection from Mobile Robots with Fuzzy Threshold Selection in Consecutive 2D Laser Scans”, María A. Martínez, Jorge L. Martínez, and Jesús Morales, Electronics, Vol. 4(1), pp. 82-93, 2015.
http://www.mdpi.com/2079-9292/4/1/82.
- “Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots”, Jorge L. Martínez, Jesús Morales, Antonio J. Reina, Anthony Mandow, Alejandro Pequeño-Boter and Alfonso García-Cerezo, IEEE International Conference on Industrial Technology (ICIT), 2015, Seville, Spain.
Slides ICIT2015.pdf
http://ieeexplore.ieee.org/xpl/login.jsp?tp=&arnumber=7125091&tag=1

- "Outdoor Mapping based on Octrees for a Mobile Robot Equipped with a 3D Laser Scanner", Manuel Zafra, Graduate thesis, E.T.S. Ingeniería Industrial, Universidad de Málaga, Apr. 2015.
Dissertation (in Spanish) Memoria.pdf

- “Steerability Analysis on Slopes of a Mobile Robot with a Ground Contact Arm”, Jesús M. García, Jorge L. Martínez, Anthony Mandow and Alfonso García-Cerezo, 23rd Mediterranean Conference on Control & Automation (MED), 2015, Torremolinos, Spain.
Slides MED2015.pdf
http://ieeexplore.ieee.org/xpl/login.jsp?tp=&arnumber=7158761&tag=1
- "Modeling and Identification of the Passive Suspension System of the Mobile Robot Andabata", Antonio Guerrero, Graduate thesis, E.T.S. Ingeniería Industrial, Universidad de Málaga, Sep. 2015.
Dissertation (in Spanish) Memoria.pdf
- “Building Fuzzy Elevation Maps from a Ground-based 3D Laser Scan for Outdoor Mobile Robots ”, Anthony Mandow, Tomás J. Cantador, Antonio J. Reina, Jorge L. Martínez, Jesús Morales and Alfonso García-Cerezo, Second Iberian Robotics Conference (ROBOT), 2015, Lisbon, Portugal.
Slides ROBOT2015.pdf
http://link.springer.com/chapter/10.1007%2F978-3-319-27146-0_3
- "Obtaining Leveled 3D Point Clouds while Andabata Moves", Manuel Zafra, Jorge L. Martínez and Jesús Morales, Technical Report, E.T.S. Ingeniería Industrial, Universidad de Málaga, Sep. 2015.
Report (in Spanish) Memoria.pdf
- "Navigation of a Mobile Robot on Uneven Terrain with its Arm in Contact with the Ground", Jesús García, PhD thesis, E.T.S. Ingeniería Industrial, Universidad de Málaga, Dec. 2015.
Dissertation (in Spanish) Memoria.pdf
- "Processing a 3D Point Cloud to Obtain of a Fuzzy Elevation Map", Manuel Zafra, Jorge L. Martínez and Antonio J. Reina, Technical Report, E.T.S. Ingeniería Industrial, Universidad de Málaga, Dec. 2015.
Report (in Spanish) Memoria.pdf

- "Autonomous Navigation with Andabata", Manuel Zafra and Jorge L. Martínez, Technical Report, E.T.S. Ingeniería Industrial, Universidad de Málaga, Mar. 2016.
Report (in Spanish) Memoria.pdf
- "Start-up and Documentation of the Outdoor Mobile Robot Andabata", Olga Cordero, Graduate thesis, E.T.S. Ingeniería Industrial, Universidad de Málaga, Jun. 2016.
Dissertation (in Spanish) Memoria.pdf
- "Efecto del Incremento de la Masa en el Brazo del Robot Móvil Lázaro sobre su Navegabilidad", Jesus M. García, Jorge L. Martínez y Alfonso J. García-Cerezo, Congreso Internacional de Métodos Numéricos en Ingeniería y Ciencias Aplicadas, Caracas (Venezuela), Jul. 2016.
- "Obtención de Barridos Láser 3D Nivelados con el Robot Móvil Andábata en Movimiento", Jorge L. Martínez, Jesús Morales and Manuel Zafra, XXXVII Jornadas de Automática, pp. 661-666, Madrid, Sep. 2016.
Poster (in Spanish) Memoria.pdf
- “Caster-leg aided maneuver for negotiating surface discontinuities with a wheeled skid-steer mobile robot”, Jesús M. García, Jorge L. Martínez, Anthony Mandow and Alfonso García-Cerezo, Robotics and Autonomous Systems, vol. 91, pp. 25—37, 2017.
http://www.sciencedirect.com/science/article/pii/S0921889016304237
- “Slide-down prevention for wheeled mobile robots on slopes”, Jesús M. García, Jorge L. Martínez, Anthony Mandow, and Alfonso García-Cerezo, 3rd International Conference on Mechatronics and Robotics Engineering (ICMRE), Paris, France, Feb. 2017.
Slides ICMRE_17.pdf
- “Voxel-Based Neighborhood for Spatial Shape Pattern Classification of Lidar Point Clouds with Supervised Learning”, Victoria Plaza-Leiva, Jose A. Gómez-Ruiz, Anthony Mandow and Alfonso García-Cerezo, Sensors, Vol. 17 (3), pp. 1-17, 2017.
http://www.mdpi.com/1424-8220/17/3/594
- “Lázaro: a mobile robot with an arm developed to contact with the ground”, Jesús M. García, Itza J. Medina, Jorge L. Martínez, Alfonso García-Cerezo, Alonzo Linares and Cristian Porras, Revista Iberoamericana de Automática e Informática industrial, Vol. 14 (2), pp. 174-183, 2017.
http://www.sciencedirect.com/science/article/pii/S1697791217300079
- “Field Navigation Using Fuzzy Elevation Maps Built with Local 3D Laser Scans”. Jorge L. Martínez, Mariano Morán, Jesús Morales, Antonio J. Reina and Manuel Zafra. Applied Sciences,Vol. 8 (397), 2018.
http://www.mdpi.com/2076-3417/8/3/397
Contacto
Contact
Jorge L. Martínez, Phone +(34) 951 952322, Office: 3.099, Edificio de Ingenierías, Calle Dr. Ortiz Ramos s/n - 29071 - Málaga, Spain. Email: jlmartinez@uma.es



