PREMOVE (P21_00684)
Predicción del Movimiento de los Participantes del Tráfico para la Integración Segura del Vehículo Autónomo en Áreas Urbanas
Proyecto de Excelencia 2021 P21-00684 de la Junta de Andalucía.
Investigador principal: Jesús Morales Rodríguez
Co-investigador principal: Jorge L. Martínez Rodríguez
Periodo de ejecución: Del 2 de diciembre de 2022 al 31 de diciembre de 2025.
Resumen
Gracias a recientes avances en el desarrollo de sistemas de control inteligente, empiezan a surgir vehículos autónomos que se prueban en carretera. Pero aplicaciones en áreas urbanas, como centros de ciudades, con zonas peatonalizadas, con carriles bici y elevado tráfico, son más exigentes para el desarrollo de estos sistemas inteligentes, y en particular, del subsistema de seguridad para evitación de colisiones. En este tipo de entorno se da un patrón de circulación en el que sobre todo peatones, patinadores y ciclistas se mezclan con vehículos privados y de transporte de mercancías compartiendo el mismo espacio. Esto puede comprometer su seguridad, incluso teniendo en cuenta que los límites de velocidad en estas zonas urbanas suelen ser más bajos que en otras áreas urbanas no restringidas.
El objetivo de este proyecto es desarrollar técnicas de detección y de predicción del movimiento de los participantes del tráfico para la evitación de colisiones, que contribuya a la integración segura del vehículo autónomo en áreas urbanas restringidas. Se diseñará un sistema multi-sensor para obtener información de los participantes del tráfico y se aplicarán técnicas inteligentes, como redes neuronales profundas, apoyadas para su ajuste en entornos simulados, que se transferirán a la aplicación real y se validarán experimentalmente.
Plataforma multisensorial
|
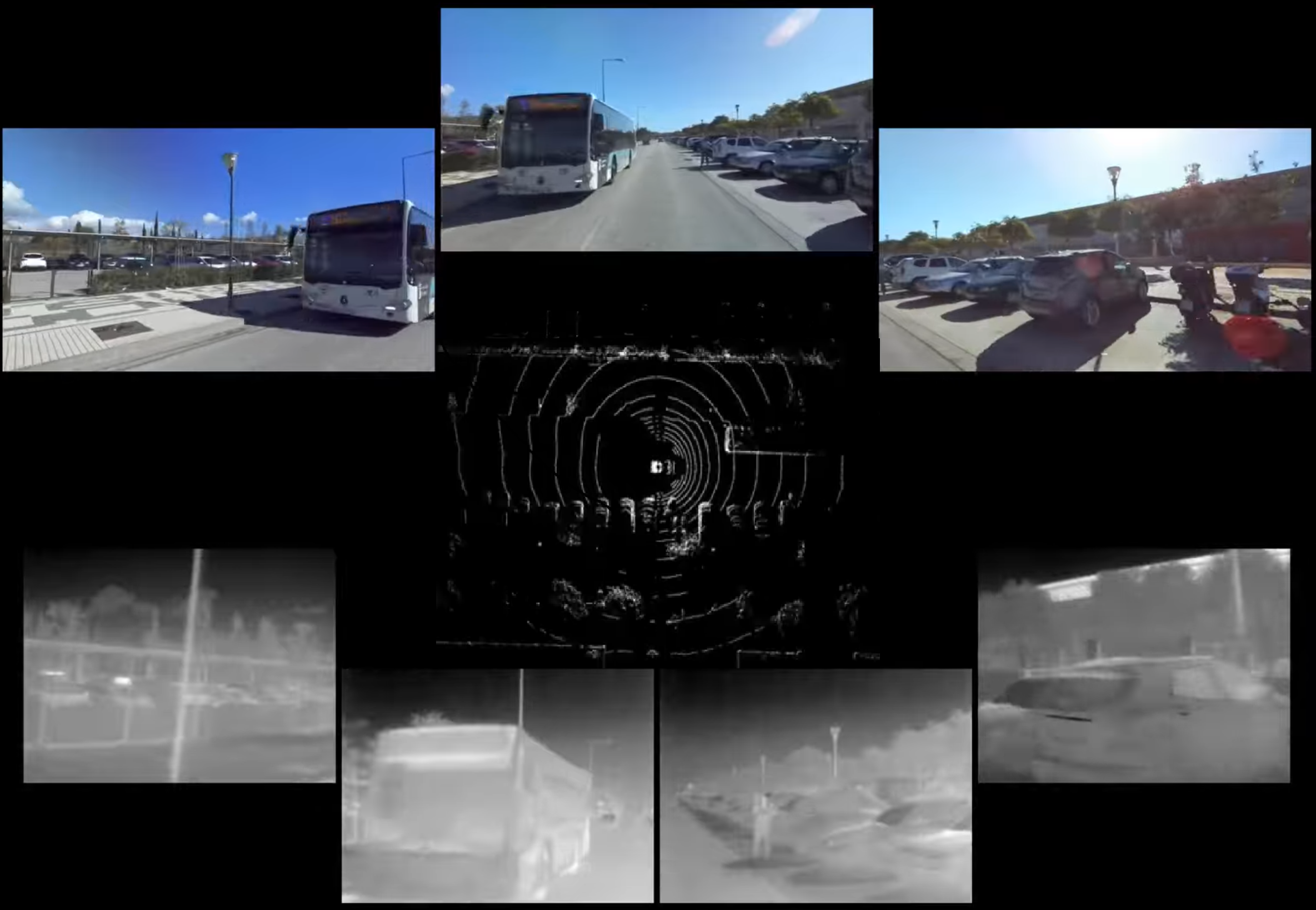
Plataforma sensorial multimodal |
Imágenes RGB, imágenes térmicas y nubes de puntos capturadas por la plataforma |

|
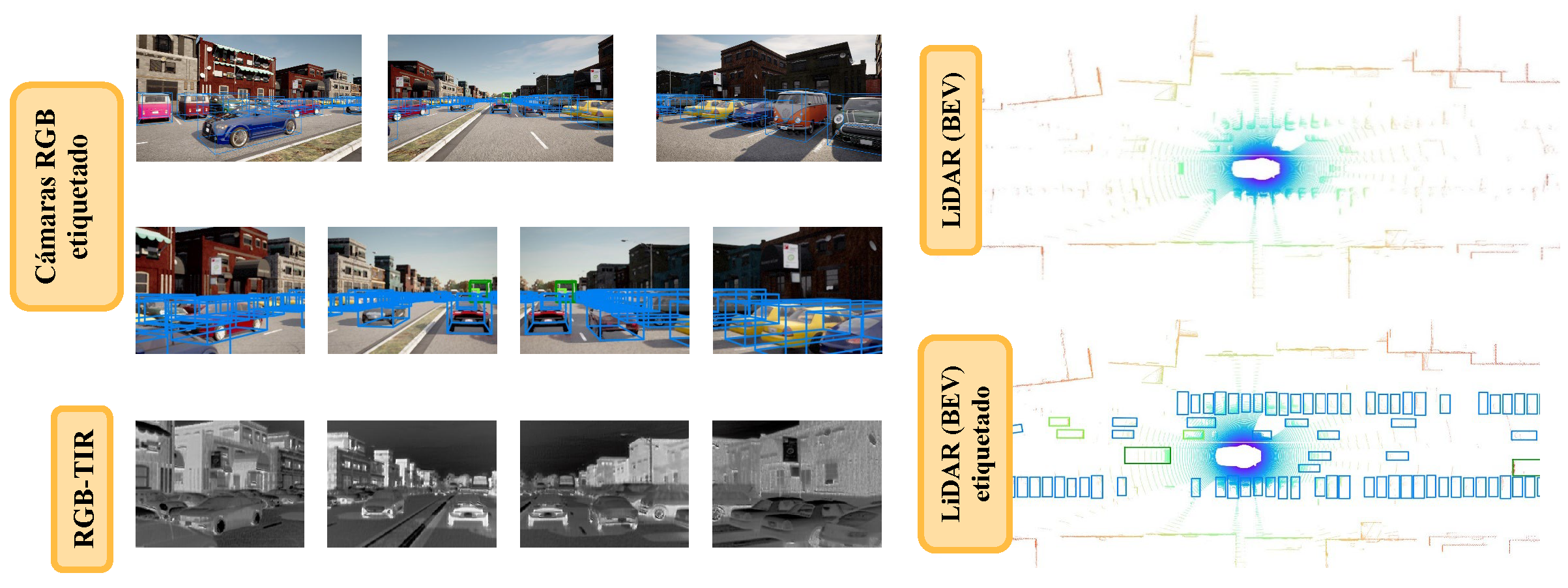
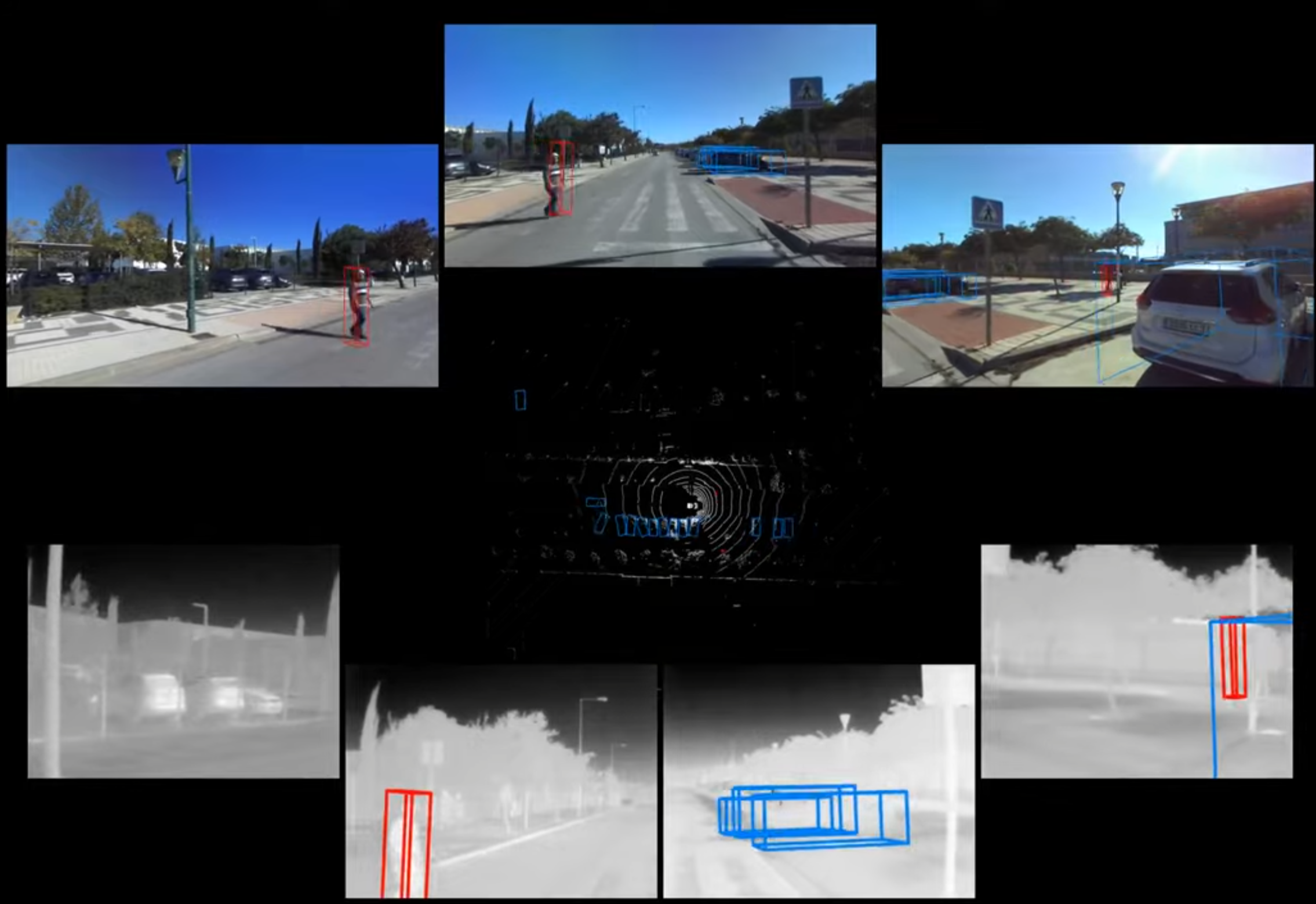
Imágenes RGB imágenes térmicas y nubes de puntos 3D generados y etiquetados automáticamente en CARLA |
Detecciones con BEVFusion |
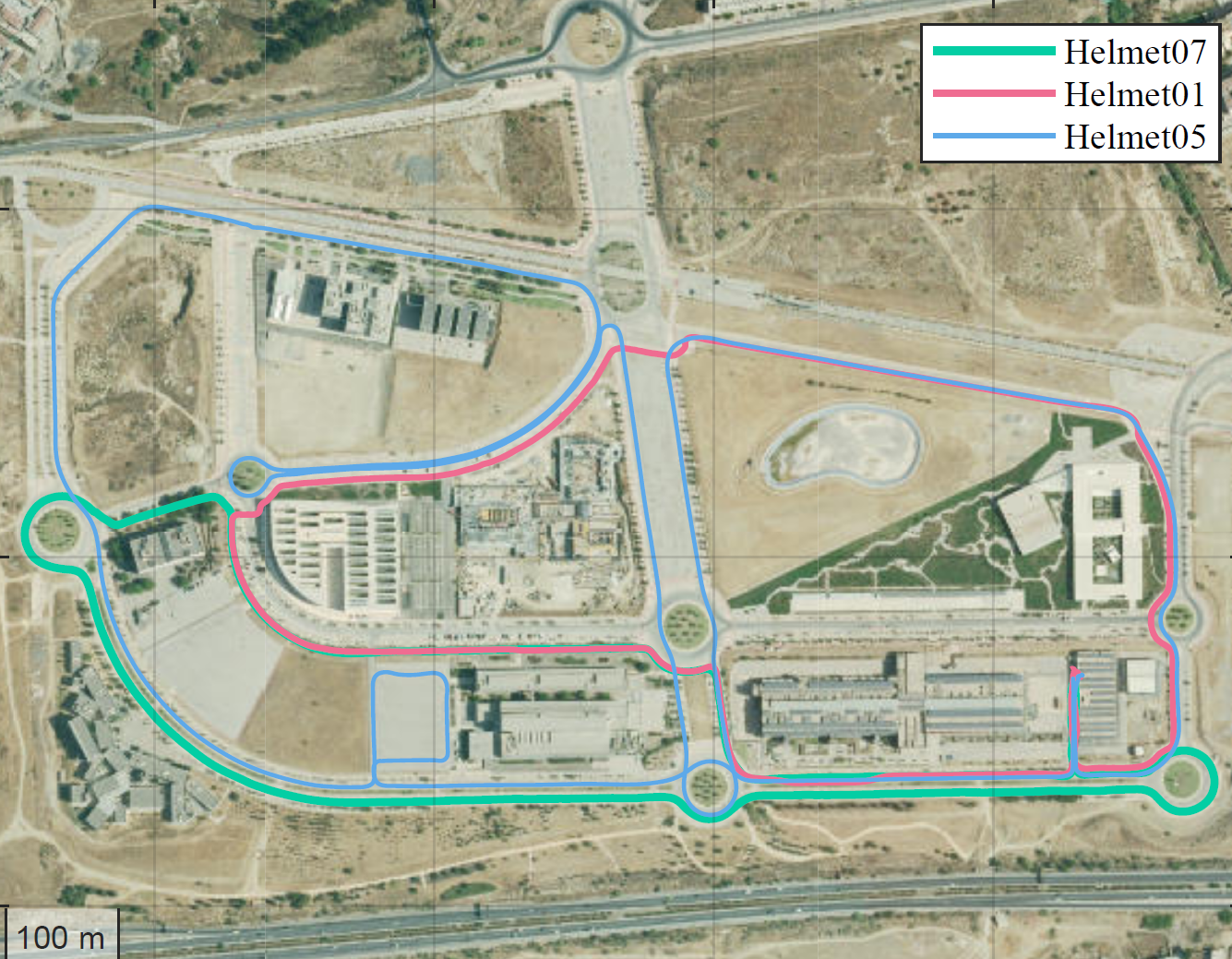
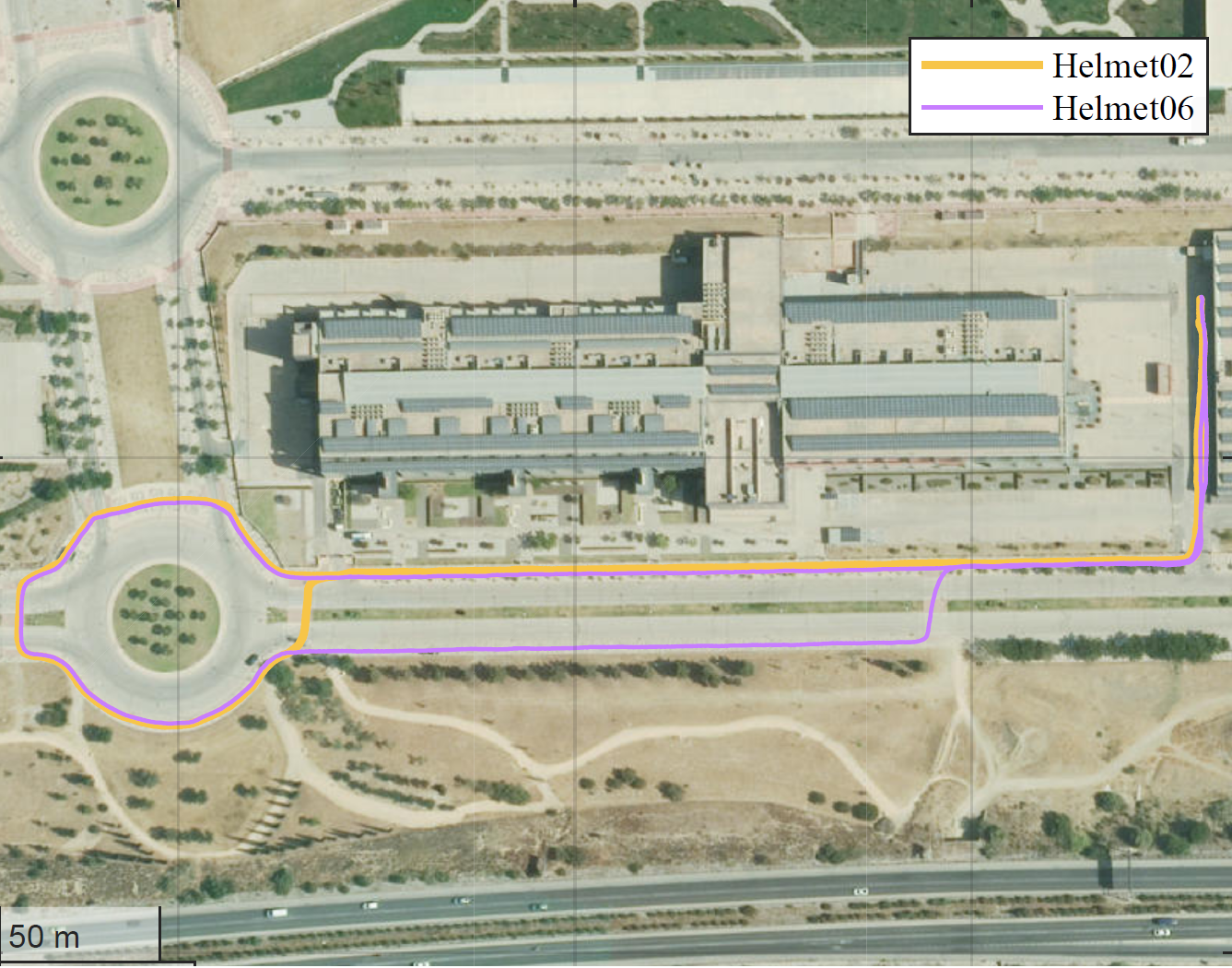
Cascos inteligentes
|
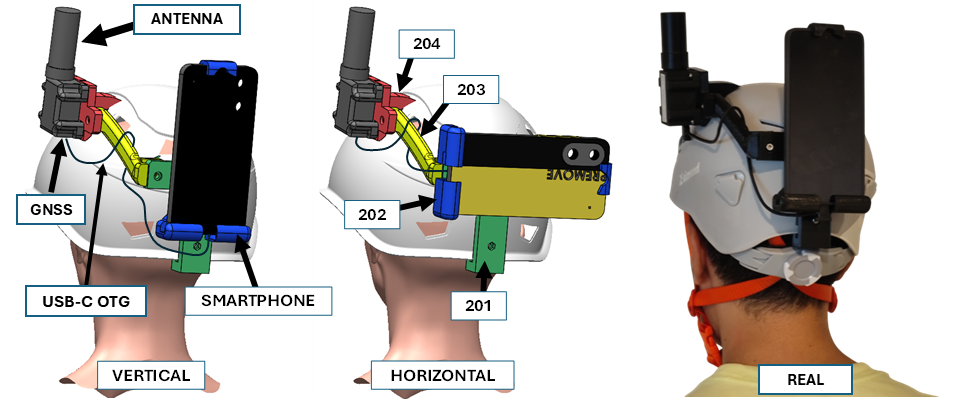
Casco Intelligente para monitorización de participantes del tráfico vulnerables. |
Trayectorias registradas de una bicicleta, una motocicleta y un patinete. |
Trayectorias registradas de dos peatones. |
Publicaciones
David Padial, Jorge Montenegro, Juan Bravo, Jesús Morales, and Jorge L. Martinez (2025) Helmet-mounted GNSS-RTK System for Continuous Tracking of Urban Traffic Participants. HardwareX (en revisión). Preprint disponible en http://dx.doi.org/10.2139/ssrn.5557800
Jorge Montenegro, David Padial, Jesús Morales, and Jorge L. Martinez (2025) The PREMOVE Dataset: Multimodal Camera and 3D LiDAR Data Collection from a Car-Mounted Sensor Platform in Urban Environments. International Journal of Robotics Research (en revisión). Dataset webpage.
Jorge Montenegro, Alberto García-Guillén, Francisco M. Castro, Jorge L. Martínez, Jesús Morales (2024). Detección de participantes del tráfico en entornos urbanos sobre imágenes RGB y nubes de puntos 3D. Jornadas de Automática, 45. DOI: https://doi.org/10.17979/ja-cea.2024.45.10870.
Jorge Montenegro, Jesús Morales, Jorge L. Martínez (2025). Integración de cámaras RGB y un LiDAR 3D para la detección de participantes del tráfico en CARLA y ROS2. Jornadas de Automática, 46. DOI: https://doi.org/10.17979/ja-cea.2025.46.12062.
Eloy Vergara Gómez (2020). Desarrollo de un simulador para el diseño de sistemas de percepción y control de vehículos autónomos en el entorno de la ampliación del Campus de Teatinos. Trabajo Fin de Máster en Ingeniería Mecatrónica. Universidad de Málaga. Enlace RIUMA. (Trabajo previo).
Daniel Steven Gamba Correa (2023). Incorporación de sensores realistas en la simulación en CARLA de la navegación de coches autónomos. Trabajo Fin de Grado en Ingeniería Electrónica, Robótica y Mecatrónica. Universidad de Málaga. Enlace RIUMA.
Alberto García Guillén (2024) Detección de agentes del tráfico en entornos urbanos en simulación utilizando Carla y ROS2. Trabajo Fin de Grado en Ingeniería Electrónica, Robótica y Mecatrónica. Universidad de Málaga. Enlace RIUMA.
Jorge Montenegro Navarro (2024) Integración de técnicas de detección de participantes del tráfico en entornos urbanos mediante un sensor LiDAR 3D y cámaras RGB con CARLA y ROS2. Trabajo Fin de Máster en Ingeniería Mecatrónica. Universidad de Málaga. Enlace RIUMA.
Manuel Ricardo Diosa Usma (2025). Desarrollo de una plataforma sensorial multimodal RGB-Térmico-LIDAR 3D para vehículo autónomo. Trabajo Fin de Grado en Ingeniería Electrónica, Robótica y Mecatrónica. Universidad de Málaga. Enlace PDF.
Natalia Jiménez Guerrero (2025) Mejora de las condiciones de tráfico en la simulación en Carla del movimiento de coches autónomos. Trabajo Fin de Grado en Ingeniería Electrónica, Robótica y Mecatrónica. Universidad de Málaga. Enlace RIUMA.
Informes técnicos
Jorge Montenegro Navarro, Jesús Morales Rodriguez (2025). Tracking y predicción del movimiento con BEVFusion, ROS y TensorRT. Universidad de Málaga. Enlace PDF.
Repositorios
Tracking y predicción del movimiento con BEVFusion, ROS y TensorRT (2025). Enlace a Github.
Dataset sintético de la plataforma sensorial multimodal PREMOVE en CARLA (2025). Enlace a Github.
Dataset PREMOVE (2025). Dataset webpage.
Divulgación
Jornadas de diseminación de resultados del Instituto Universitario de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos (IMECH-UMA). Febrero de 2024. Escuela de Ingenierías Industriales. Presentación.
Jornadas de diseminación de resultados del Instituto Universitario de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos (IMECH-UMA). Mayo de 2025. Escuela de Ingenierías Industriales. Poster
Contacto
Jesús Morales Rodríguez. Tlf. 951952323, email: jesus.morales@uma.es
Jorge L. Martínez Rodríguez. Tlf. 951952322, email: jlmartinez@uma.es



