UMA-SAR Datasets

The UMA-SAR Dataset is a collection of multimodal raw data captured from a manned all-terrain vehicle in the course of two realistic outdoor search and rescue (SAR) exercises for actual emergency responders conducted in Málaga (Spain) in 2018 and 2019. The sensor suite consisted of overlapping visible light (RGB) and thermal infrared (TIR) forward-looking monocular cameras, a Velodyne HDL-32three-dimensional (3D) lidar, as well as an inertial measurement unit (IMU) and two global positioning system (GPS) receivers as ground truth. Our mission was to collect a wide range of data from the SAR domain, including persons, vehicles, debris, and SAR activity on unstructured terrain. In particular, four data sequences were collected following closed loop routes during the exercises, with a total path length of 5.2 km and a total time of 77 min. Additionally, we provide three more sequences of the empty site (i.e., pre-exercise or post-exercise) for comparison purposes (an extra 4.9 km and 46 min). Furthermore, the data is offered both in human-readable format and as rosbag files, and two specific software tools are provided for extracting and adapting this dataset to the users’ preference. The review of previously published disaster robotics repositories indicates that this dataset can contribute to fill a gap regarding visual and thermal datasets and can serve as a research tool for cross-cutting areas such as multispectral image fusion, machine learning for scene understanding, person and object detection, and localization and mapping in unstructured environments.
Please check the "readme.md" file for further information.
A full description of the dataset is given in the IJRR article: https://doi.org/10.1177/02783649211004959. The "accepted version" can be downloaded from here.
CITATION
If you use this dataset, please cite it as:
@article{MoralesUMASAR:2021,
author = {Morales, Jes\'us and V\'azquez-Mart\'in, Ricardo and Mandow, Anthony and Morilla-Cabello, David and Garc\'ia-Cerezo, Alfonso},
title = {The {UMA-SAR} Dataset: Multimodal Data Collection from a Ground Vehicle During Outdoor Disaster Response Training Exercises},
journal = {The International Journal of Robotics Research},
volume = {40},
number = {6-7},
pages = {835--847},
year = {2021},
doi = {10.1177/02783649211004959},
}
DATASETS
> 2018 SEQUENCES:
| DESCRIPTION | PATH | DATASET LINKS | VIDEO PREVIEW |
2018-06-01-12-14-47
| 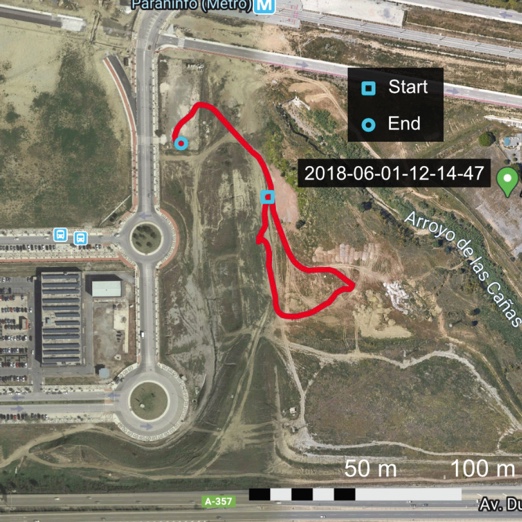 | ZIP FILE (human readable text format and jpeg images): ROSBAG: | |
2018-06-01-12-44-10
| 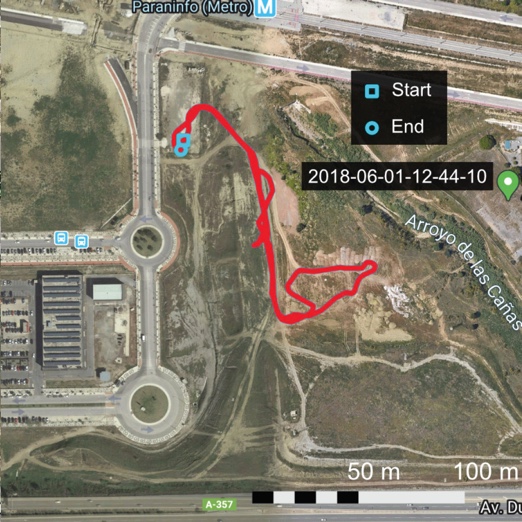 | ZIP FILE (human readable text format and jpeg images): ROSBAG: | |
2018-07-25-11-25-10
|  | ZIP FILE (human readable text format and jpeg images): ROSBAG: | |
2018-07-25-11-39-26
|  | ZIP FILE (human readable text format and jpeg images): ROSBAG: |
> 2019 SEQUENCES:
| DESCRIPTION | PATH | DATASET LINKS | VIDEO PREVIEW |
2019-06-05-13-55-16
|  | ZIP FILE (human readable text format and jpeg images): ROSBAG: | |
2019-06-06-10-08-55
| 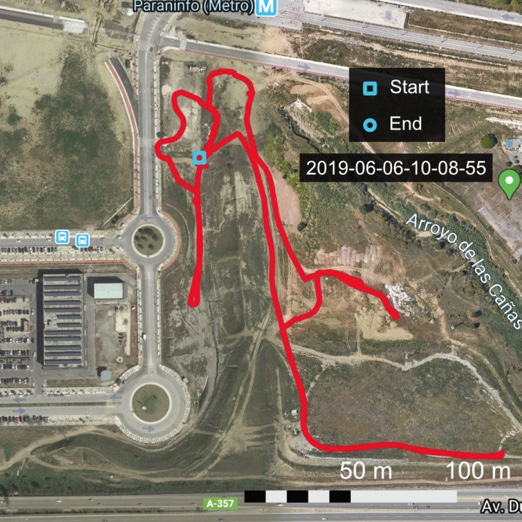 | ZIP FILE (human readable text format and jpeg images): ROSBAG: | |
2019-06-06-10-35-12
| 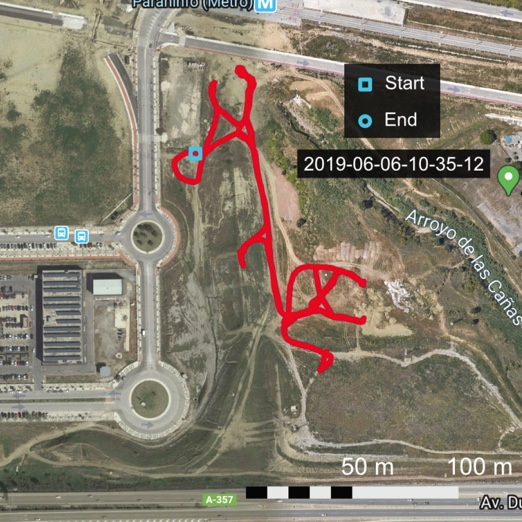 | ZIP FILE (human readable text format and jpeg images): ROSBAG: |
SOFTWARE TOOLS
Sequence extractor: https://github.com/Robotics-Mechatronics-UMA/dataset_extract_sequence
This tool can be used to extract a sequence from an uncompressed data folder. The user can specify the start and end timestamps for the sequence as well as a subset of sensor modalities.
Enlace a los paquetes ROS empleados para capturar la información.
Modified GPS driver: https://github.com/Robotics-Mechatronics-UMA/novatel_gps_driver_modified
Modified Novatel driver for use with the JAVAD GPS receivers.
RGB CAMERA CALIBRATION
The camera_calibration ROS package was used to obtain the intrinsic parameters of the RGB camera. Images of a 11x7 chessboard (10 cm side) as well as calibration results are provided here: https://riuma.uma.es/xmlui/bitstream/handle/10630/23918/rgb_calibrationdata.tar.gz?sequence=9&isAllowed=y
EXTERNAL VIEW OF THE VEHICLE
The following video presents available footage and photographs providing context and external views of the all-terrain vehicle and multimodal sensor suite used for collecting the data.
DISCLAIMER
THIS DATA SET IS PROVIDED "AS IS" AND WITHOUT ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, WITHOUT LIMITATION, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE.
This dataset is the property of Universidad de Málaga, Robotics & Mechatronics Group. It is to be used only for research purposes giving due credit by citation.
The files of the SAR-UMA data set linked on this website are archived and preserved in the UMA institutional repository (RIUMA): https://hdl.handle.net/10630/23918
CONTACT
Please, contact us for futher information: jesus.morales[at]uma.es, rvmartin[at]uma.es, amandow[at]uma.es, ajgarcia[at]uma.es.



