LAENTIEC: LABORATORIO Y AREA DE EXPERIMENTACIÓN EN NUEVAS TECNOLOGÍAS PARA LA INTERVENCIÓN EN EMERGENCIAS

INDICE
- INTRODUCCION
- CARTA DE SERVICIOS
- PERSONAL
- GOBERNANZA
- COLABORACION CON LA CATEDRA DE SEGURIDAD, EMERGENCIAS Y CATASTROFES
- GALERIA DE VIDEOS
- AYUDAS RECIBIDAS
LAENTIEC está situado en la ampliación del Campus de Teatinos de la Universidad de Málaga, junto a la Escuela de Ingenierías Industriales (EII). El Laboratorio y Area de Experimentación en Nuevas Tecnologías para la Intervención en Emergencias (LAENTIEC) se creó como una iniciativa de investigadores de varios grupos de investigación de la Universidad de Málaga, cuyas actividades están relacionadas con el área de la seguridad, las emergencias y las catástrofes. Por su naturaleza, los grupos de investigación de las Universidades, así como los cuerpos y organismos en el área de la protección civil, la seguridad y las emergencias, precisan someter los resultados de su I+D a procesos de benchmarking que asegure la calidad de los resultados de su investigación, dentro de un entorno controlado y sometido a una adecuada monitorización. Las aplicaciones contemplan diferentes escenarios en campo abierto (outdoor) en entorno natural y en entorno urbano.
Hoy LAENTIEC es un servicio común de investigación de la universidad de Málaga que proporciona acceso a equipamiento científico-técnico, tecnologías, servicios especializados de I+D y asesoramiento técnico experto, a investigadores pertenecientes a la Universidad de Málaga, pero también a investigadores externos a la misma, incluyendo otras Universidades, Centros de investigación, Organismos Públicos y Empresas en el ámbito de la Seguridad, las Emergencias y Catástrofes. El equipamiento científico-técnico disponble está altamente especializado. Está concebido para su uso en escenarios realistas y permite su aprovechamiento por un gran número y variedad de usuarios. Para ello dispone de una carta de servicios, aprobada por el CONSEJO SOCIAL de la Universidad de Málaga.
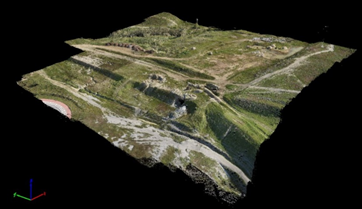
LAENTIEC dispone para cumplir su misión de 90.000 m2 de terreno dispuestos por la Universidad de Málaga para la realización de experimentos. El área, con una orografía muy variada, cuenta con un cauce de un arroyo y con un doble falso túnel de unos 100 metros de longitud, para pruebas en condiciones GPS-denied. Consiste en un campo de pruebas en entornos no estructurados, con terreno de diferente dificultad de acceso, que se utiliza para la construcción de escenarios y realización de pruebas con drones, robótica móvil terrestre aplicada a las emergencias, pruebas de vehiculos, pruebas de equipamiento técnico de equipo de rescate, prueba de redes de comunicaciones, sistemas de percepción y sensorica, aplicaciones de ingeniería biomédica, etc.
Asimismo se dispone de una nave taller colindante con el terreno, y cuya ejecución se llevó a cabo a lo largo del segundo semestre de 2020. Se disponen de una infraestructura de comunicaciones y seguridad (WIMAX 5 GHz con conexión WIFI Outdoor a 2.4Ghz, red con 10 cámaras PTZ para cobertura del área y 10 cámaras tipo bullet para vigilancia perimetral) y la instalación de una red básica de sensores inalámbricos sobre tecnología GSM y LoraWan (sensores ambientales, meteorológicos, gases, radiación, ...) que permitan monitorizar el entorno de manera remota y dar cobertura de comunicaciones y seguridad perimetral e interior en el conjunto de las 9 Hectáreas de extensión en terreno natural así como a otras 9 en entorno urbanizado, que cubre las inmediaciones de la EII así como la ETSIT. Se dispone tambien de un lago artificial, de unos 8000 m2 para su utilización en pruebas de salvamento acuático.
Asimismo se le ha dotado de una infraestructura adicional que incluye sistemas robotizados para prueba de vehículos sin conductor/autónomos, kit de robotización de vehículos, una plataforma tele-operada/autónoma para terreno extremo y anfibio (ARGO ATLAS J8), un manipulador colaborativo liviano KUKA RLB, así como un equipo de computación de altas prestaciones para aplicaciones de robótica cognitiva de NVIDIA.
Esta zona es también el escenario en el que se desarrollan anualmente las Jornadas de Emergencias, Seguridad y Rescate, en las que colabora el laboratorio, dando soporte a los grupos de investigación y a los diferentes efectivos de Cruz Roja, Sanitarios, Fuerzas y Cuerpos de Seguridad del Estado, Fuerzas Armadas, otros Organismos Públicos, Asociaciones y Empresas. Son un marco excepcional para probar la ultima tecnologia en el campo de las emergencias.

Área de Experimentación en Nuevas Tecnologías para la Intervención en Emergencias y Catástrofes de la Universidad de Málaga.

Edificio LAENTIEC en la Escuela de Ingenierías Industriales.






Imagenes de los ejercicios JEMER2022 en LAENTIEC.
Carta de Servicios
El servicio dispone de un protocolo de acceso a los equipos y un sistema que permita repercutir a los usuarios los costes de las prestaciones realizadas. Para ello Laentiec dispone de una Carta de Servicios actualizada anualmente Carta-de-Servicios-LAENTIEC aprobada por Consejo Social el 14 de Diciembre de 2023 Certificado-Consejo-Social.
Se dispone de los siguientes equipamientos y servicios que se pueden solicitar a traves del siguiente formulario: Formulario-Solicitud -Servicios-Laentiec, enviandolo a ajgarcia@uma.es
- Infraestructura de comunicaciones en base a Estación Base binodo WIMAX 140Mbps 4900-5875Mhz y WIFI outdoor 2,4Ghz junto con cámaras PTZ para cobertura del área y cámaras tipo bullet para vigilancia perimetral
- Red de sensores inalámbricos, con router MeshLium, sensores ZigBee / Lorawan
- Obtencion de DATASETS. Camara estereo, CCD / INFRARROJO / GPS / LIDAR
- VELODINE HDL-32/16
- ARGO 8x8 XTI
- ARGO J8 modo teleoperado / Follow me
- SISTEMA ROBÓTICO PARA PRUEBA DE VEHÍCULOS SIN CONDUCTOR AB Dynamics + Nissan Leaf
- Nave Taller LAENTIEC (Almacenamiento)
- Nave Taller LAENTIEC (Uso en Desarrollo)
- Area Drones Vuelo Interior
- Operación Drones DJI Matrice 600 / DJI Mavic / ATYGES (Fases prevuelo, vuelo y procesado)
- KUKA LBR iiwa 7 R800:
- Proyecto de escenarios de rescate
- Construcción de escenarios con material / maquinaria extra.
- Camaras Optitrack
Ademas pueden contratarse a través del artículo 83 de la L.O.U. los siguientes:
- Servicio de pruebas en red de acceso radio comercial LTE/ 5G Stand Alone con capacidades de monitoreo, seguimiento de terminales.
- Servicio de pruebas sobre red IoT multitecnología (LoRaWAN, Bluetooth, WiFi, LTE) con 120 sensores de diferentes tipos desplegados en el Campus de Teatinos.
- Técnicas de localización con redes móviles (4G/5G) y otras tecnologías inalámbricas (WiFi/UWB), y usos para la localización en la gestión de redes.
- Control de drones mediante redes 4G/5G
- Servicios de red basados en la ubicación
Descripción de algunos de los equipos:
Plataforma teleoperada/autónoma para terreno extremo y anfibio.

Es una plataforma 8x8 anfibia de tracción eléctrica y dimensiones 2m94 x 1m40 x 750kg y altura libre del suelo de 24 cm, cuyas características mas importantes son:
- Completamente anfibia, con capacidad de navegar a una velocidad de hasta 5 km / h, y salir del agua hacia la tierra.
- Capacidad de operación en terreno extremo con un sistema de dirección deslizante de 8 ruedas en una plataforma de tipo skid-steer.
- Capacidad de carga de hasta 600 kg en tierra y 300 kg en agua
- Control de operación de precisión de baja velocidad y capacidad de velocidad máxima de al menos hasta 30 km/h.
- Baterías de ion de litio intercambiables 48V / 100Ah rápidos.
- Plataforma estable capaz de subir, bajar y atravesar pendientes de hasta 40 grados
- Sistema de llanta y neumático que permita su operación a presión de neumáticos muy baja y capacidad de funcionamiento plana para hasta 3 neumáticos.
- Sistema de control remoto con total capacidad de teleoperación usando la estación de control remoto (RCS) a través de un radio de alcance extendido y sistema multicámara.
- Operación autónoma a través del punto de ruta Planificación de rutas GPS con sensores y detección de obstáculos.
- Sistema “follow me” para seguimiento de líder humano a través del sistema de medición láser y seguimiento de ruta GPS para retorno autónomo.
MANIPULADOR COLABORATIVO LIVIANO INTELLIGENT WORK ASSISTANT

- Robot de estructura liviana con sensores de momento integrados con carga nominal de unos 7 kg, alcance máximo: 800 mm, número ejes: 7 y repetibilidad de posición ± 0,1 mm. Peso aproximado 24 kg.
- Unidad de control del robot basado en procesador multinúcleo. Regulación de la alta velocidad. Rack de 19 pulgadas. Software de control para el robot de estructura liviana. Software optimizado para procesos sensibles ofrece funciones básicas como el control de fuerza seguro, la detección segura de colisiones y el control seguro de momentos. Cumplen los requisitos conforme a la norma EN-ISO 10218-1:2011.
EQUIPO DE COMPUTACION DE ALTAS PRESTACIONES (para aplicaciones en ROBOTICA COGNITIVA)

Estación de trabajo con 4-GPU/256GB. Rendimiento: 480 TeraFLOPS. Construida en base a GPU NVIDIA Tesla, Aceleradores V100, y arquitectura Tensor Core. Debe maximizar el rendimiento en aprendizaje profundo (Deep Learning), y mostrar un rendimiento 100x en aceleración en el análisis de grandes conjuntos de datos, en comparación con un clúster de servidor Spark de 20 nodos. Aumento de 5x en el rendimiento de E / S sobre las GPU conectadas a PCIe.
SISTEMA ROBÓTICO PARA PRUEBA DE VEHÍCULOS SIN CONDUCTOR / AUTÓNOMOS

- Robot de dirección: Ensamblaje de motor sin escobillas. Puntal de reacción de par telescópico neumático. Sistema de medición de par de enlace paralelo. Controlador de dirección. Interruptor de parada de seguridad / prueba remota. Software de control.
- Robot de freno y acelerador combinado incluyendo enlaces de pedal y abrazaderas de conexión. Celula de carga de galga extensométrica en línea para medición / control de fuerza. Software de control para pruebas AR / BR estándar y control de velocidad.
- Robot de cambio de marcha: Conjunto de motor de cambio de marcha doble actuado. eje de control adicional. Software de control para robot de cambio de marcha.
- Equipamiento Driverless testing. Radio Track (unidad del vehículo). Software DTS dentro del vehículo. Detección de Muerte de motor para Pruebas sin conductor. Equipo de estación base. Actuador de seguridad secundario. Controlador de seguridad (versión CBAR). Radio Track Fi (unidad de estación base). Unidad de controlador de seguridad para 2 vehículos. Mandos a distancia - Volante y pedales. Software de estación base sin conductor
Sistemas de cámaras de captura de movimiento

Sistema dedicado a la captura y seguimiento de movimientos en tiempo real con marcadores infrarrojos mediante diez cámaras OptiTrack Prime x13 con tecnología de seguimiento óptico de alta velocidad (240 FPS nativo, 1000FPS máximo) y alta precisión (resolución 1.3MP, precisión 3D +/-0.20mm). Las cámaras están montadas en soportes o trípodes ajustables para permitir la flexibilidad en su posición y orientación en diferentes puntos del espacio, lo que permite maximizar la cobertura y la captura de movimientos desde múltiples ángulos. Se dispone de una estación de trabajo dedicada con software especializado para procesar y analizar los datos capturados, realizar un seguimiento preciso de los marcadores y reconstruir los movimientos en un modelo tridimensional del espacio, visualizar los datos y calibrar y sincronizar las cámaras. Este sistema permite dar servicio a una amplia gama de aplicaciones en investigación y desarrollo tecnológico, incluyendo control de sistemas multi-UAV, estudios de biomecánica, análisis y ground-truth de movimientos, diseño de simuladores, investigación en realidad virtual y animación de personajes, entre otras aplicaciones.
CONDICIONES GENERALES: La prestación del servicio se entiende se realiza con la participación expresa de un técnico de LAENTIEC. Por razones de seguridad no se contempla la cesión del material o su simple utilización en régimen de alquiler. Se entiende por Pago por PRESTACION DE SERVICIOS al pago total o parcial del coste del servicio realizado por LAENTIEC por servicios recíprocos de la parte contratante, cuyo acuerdo se establecerá a través de convenios o de contrato artículo 83 de la L.O.U.
El servicio dispone de los recursos humanos con dedicación completa a su gestión, incluido el mantenimiento, la actualización y el manejo del equipamiento. La formacion mínima es de nivel de máster, contando además con varios doctores. Se dispone de 6 titulados con formación de piloto de RPAS, uno con el Curso de Radiofonista, un Operador de Vuelo.
Cuenta con un RESPONSABLE del Laboratorio y del Área de Experimentación, TRES ASESORES, de los Institutos de Investigación IMECH-UMA (Instituto de Investigación en Ingeniería Mecatrónica y Sistemas Ciberfísicos), TELMA (Instituto de Investigación en Ingeniería de Comunicaciones) y la Cátedra SEC (Cátedra de Seguridad, Emergencias y Catástrofes) y 6 TÉCNICOS con dedicación a tiempo completo (ver apartado de Personal del servicio común). Asímismo cuenta con la colaboración de ASESORES EXTERNOS en materia de seguridad, diseño de escenarios y planes de Autoprotección como colaboradores externos de la Cátedra de Seguridad, Emergencias y Catástrofes, en particular el Consorcio Provincial de Bomberos y Protección Civil de la Diputación provincial de Málaga.
Colaboración con la Cátedra de Seguridad, Emergencias y Catástrofes
Este servico nació como respuesta a las expectativas de diferentes grupos de investigación, instituciones y profesionales relacionados con los riesgos, seguridad y protección civil, así como empresas, mostradas durante los ejercicios organizados por la cátedra a lo largo de 18 años, en el marco de las Jornadas de Seguridad, Emergencias y Catástrofes..
Estos ejercicios incluyen casos multidisciplinares de rescate en situaciones realistas. Los participantes superan los 250 profesionales, tales como “Bomberos sin fronteras (BSF)”, “Consorcio Provincial de Bomberos de Málaga”, “Cuerpo de Bomberos de Benalmádena”, “GOAS, Grupo de Operaciones Especiales de la Policía Local de Málaga”, ¨Policía Local de Málaga", “Unidad Militar de Emergencias (UME)”, UMAER (Servicio de Aeroevacuación del Ejército del Aire), Brigada de la Legión Española (Ronda), Emergencias 112, Samur, Cruz Roja, Protección Civil de la Diputación de Málaga, Protección Civil de Málaga, Protección Civil de Marbella, sólo por indicar algunos.
Galería de videos
Uso del laboratorio, plataformas robóticas y área experimental de LAENTIEC en distintas ediciones de las Jornadas sobre Seguridad, Emergencias y Catástrofes de la UMA:
Ayudas recibidas:
EQC2024-007967-P. (2024)
"LAENTIEC: Infraestructura robótica y de comunicaciones para la protección de la población, los primeros intervinientes y las infraestructuras en escenarios extremos de desastre“.
UNMA15-CE-3186 (2016) MINECO
Infraestructura para el Area de Experimentación en Nuevas Tecnologías para
la Intervención en Emergencias
EQC2018-004299-P (2019) MINECO
Plataformas robóticas para el Laboratorio y Area de experimentación en nuevas tecnologías para la intervención en emergencias y catástrofes (LAENTIEC).
Nº 5808-15 Expte: 1152401 (2019) JUNTA DE ANDALUCIA.
Infraestructura para dar soporte técnico en la experimentación en campo abierto a aquellos grupos de investigación cuyas actividades están relacionadas con el área de la seguridad, catástrofe y las emergencias.
Consiste en un campo de pruebas no estructurado, con terreno de diferente dificultad de acceso, que se utiliza dentro de las actividades del grupo en robótica móvil aplicada a las emergencias. Esta zona es también el escenario en el que se desarrollan anualmente las Jornadas de Emergencias, Seguridad y Rescate, en las que colabora activamente el grupo de investigación, y en la que también participan efectivos de Cruz Roja, Fuerzas y Cuerpos de Seguridad del Estado, y Fuerzas Armadas, entre otras. Son un marco excepcional para probar métodos de navegación en entornos no estructurados, incluyendo la participación de vehículos de diferente naturaleza, y personas.



