beforecontenttitle
Projects
Después del título del contenido
Antes del cuerpo del contenido
Trozos html editables
Trozos html editables
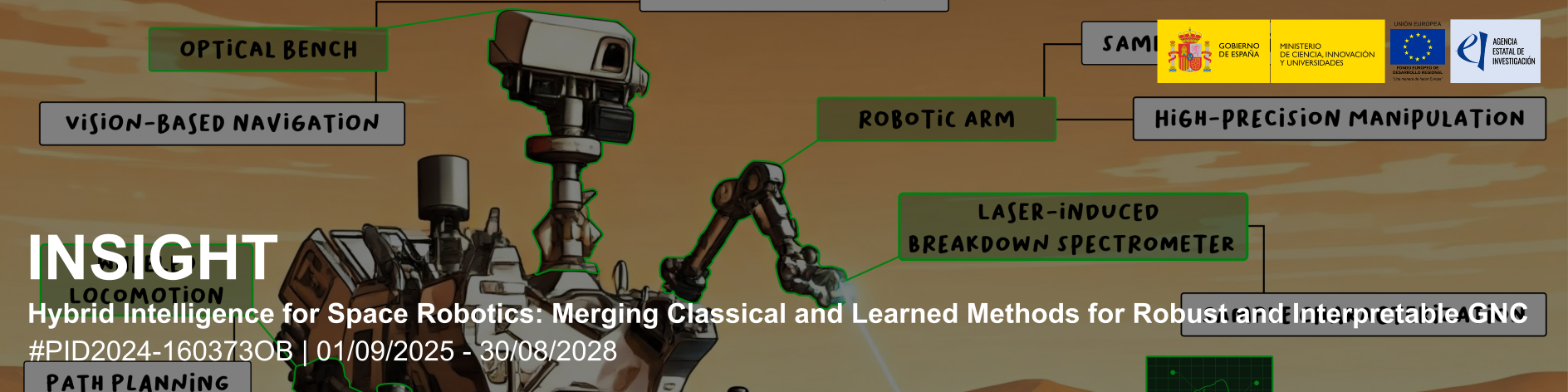
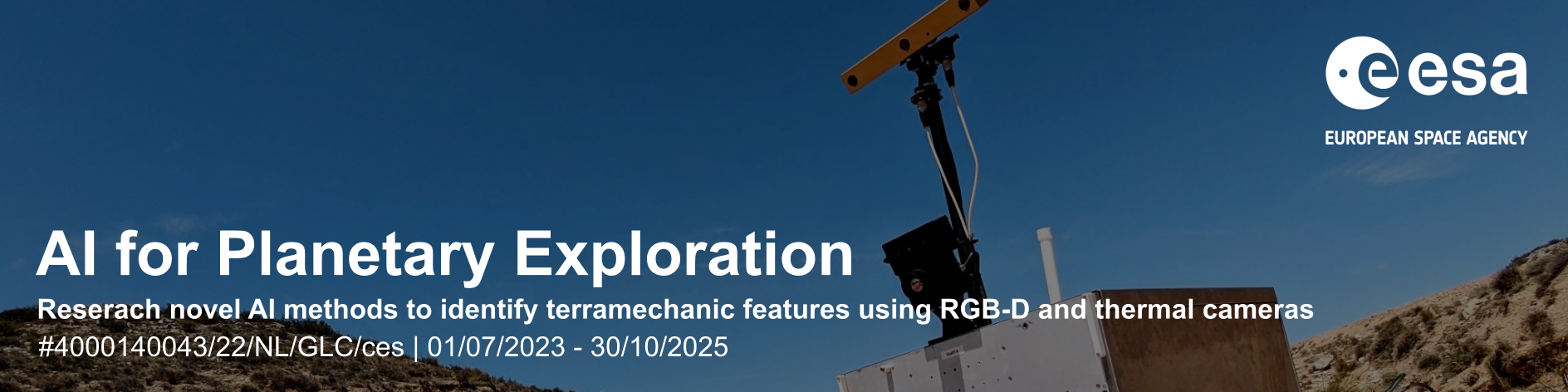
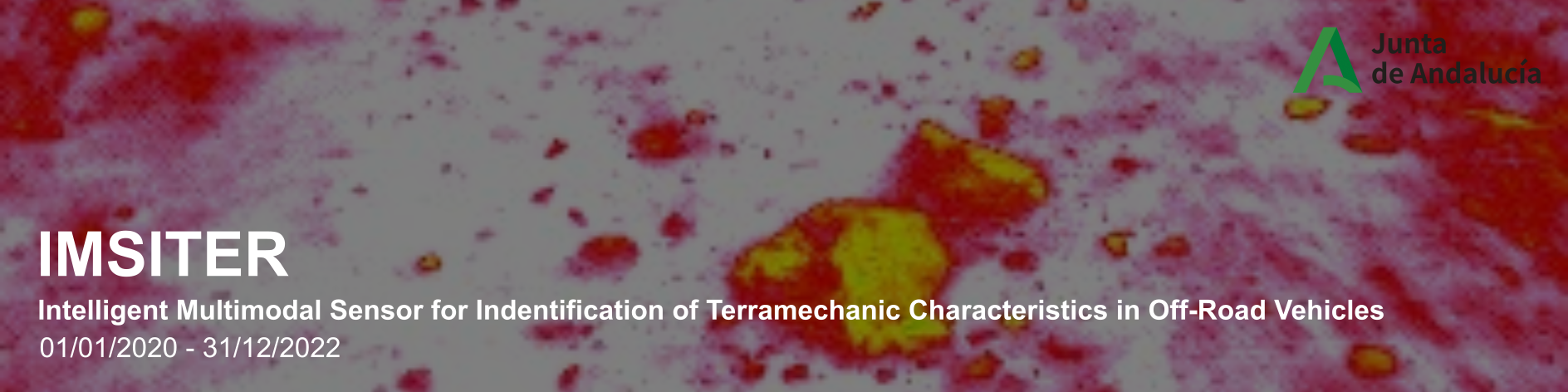
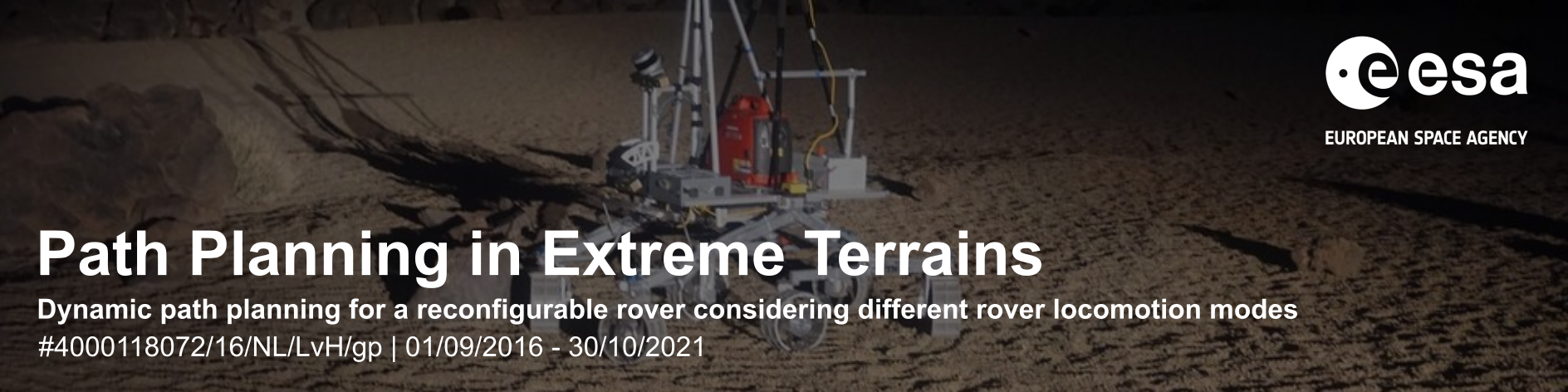
Planetary Robotics




Orbital Robotics
Robotic Telescopes

Después de cuerpo del contenido

