beforecontenttitle
Planetary exploration
Después del título del contenido
Antes del cuerpo del contenido
Trozos html editables
Trozos html editables
The main objective of the lab is to research how to increase autonomy in space robotics, mainly centred on planetary exploration. This research is focused on four topics: Path planning, motion planning, Artificial intelligence (AI) and Advanced sensors:
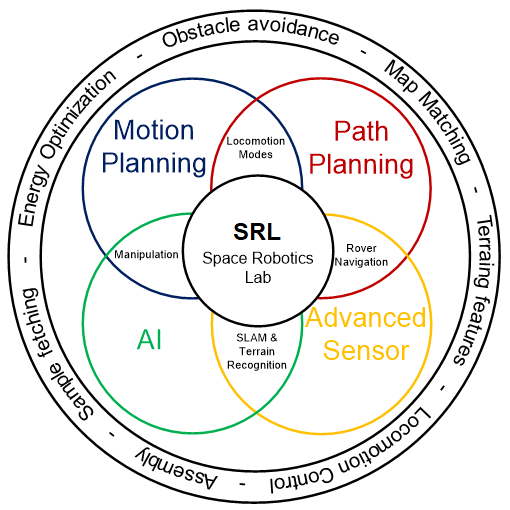
- Path planning: we have contributed with a multilayered long & short range method based on PDE optimization techniques, such as the Fast Marching Method and the Ordered Upwind Method. These techniques have been applied in planetary exploration and also in search & rescue scenarios with promising results.
- Motion planning: we are working on kinodynamic motion planning, trying to speed up methods related to the use of optimal control techniques to plan the robot motion for each actuator. Moreover, we have contributed with an analysis of different locomotion modes that could be used in future planetary exploration missions.
- Advanced sensors: The use of advanced sensors improve rover navigation, providing rich information about the robot scenario. We are working on the development of advanced sensors able to provide improved information about the robot environment, such as multimodal sensors to identify terramechanics features that improve the rover navigation.
- Artificial Intelligence: The use of AI helps to improve the navigation capability of robots in space. We are investigating how information provided by advanced sensors can be merged and processed by AI, providing improved information. On the other hand, the use of AI helps to identify objects that require to be manipulated using motion planning and control methods.
IPR Policy
The objective of this lab is to share all the obtained results that are funded by public organisms throug open-source license. We decided to use MIT license for all the software/libraries/components that we develop and publish through conference and/or journal papers.

Después de cuerpo del contenido

