
Robótica
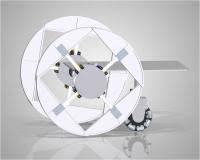 | Robot Móvil de Locomoción Reconfigurable (2014) A partir del trabajo del módulo motriz de pies móviles (2012) se ha realizado una evolución de este y se ha diseñado un robot híbrido reconfigurable con dos modos de funcionamiento. la arquitectura del robot constaría de dos módulos reconfigurables, unidos entre sí por un soporte central. Además, el robot constaría de un tercer punto de apoyo, que podría ser un tercer módulo, u otro elemento rodante como una rueda. Por simplicidad, se ha escogido como tercer apoyo una rueda omnidireccional. A su vez, cada uno de los módulos estaría compuesto por cuatro apoyos con forma de segmento circular, dos cremalleras que unirían, a modo de barra, a dos apoyos cada una, y un cuerpo central que alojaría el sistema de transmisión para desplazar las cremalleras.
|
 | Módulo Motriz de Pies Móviles (2012) Sistema de locomoción híbrido de geometría cilíndrica y pies deslizantes, fácilmente acoplable a un cuerpo robot, lo que conlleva una infinidad de posibilidades de uso.
|
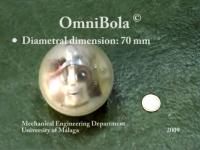 | Omnibola (2009) Robot esférico, de 70 mm de diámetro, compuesto por dos ruedas (cada una accionada por un motor) que transmite movimiento a la carcasa.
|
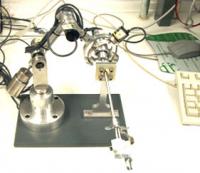 | Robot Quirúrgico (2002) Diseño mecánico de robots que se usarán como un cirujano automático controlado remotamente.
|
 | Robots Móviles (1996-2002) Diseño mecánico de robots móviles. Selección de la configuración mecánica y diseño de sistemas de frenado y dirección y tracción. |
Otros campos de investigación
> Robótica | > Tesis |



