
Robotics
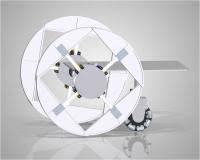 | Reconfigurable Locomotion Mobile Robot (2014) From the work of the mobile feet motor module (2012), an evolution of this has been carried out and a reconfigurable hybrid robot with two operating modes has been designed. the architecture of the robot would consist of two reconfigurable modules, linked together by a central support. In addition, the robot would have a third support point, which could be a third module, or another rolling element such as a wheel. For simplicity, an omnidirectional wheel has been chosen as the third support. In turn, each of the modules would be composed of four supports in the shape of a circular segment, two racks that would join, like a bar, to two supports each, and a central body that would house the transmission system to move the racks.
|
 | Mobile Feet Motor Module (2012) Hybrid locomotion system with cylindrical geometry and sliding feet, easily attachable to a robot body, which entails infinite possibilities of use. |
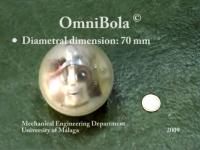 | Omnibola (2009) Spherical robot, 70 mm in diameter, made up of two wheels (each driven by a motor) that transmit movement to the casing. |
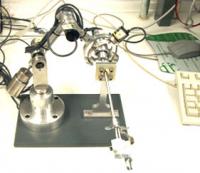 | Surgical Robot (2002) Mechanical design of robots to be used as a remote controlled automatic surgeon. |
 | Mobile Robots (1996-2002) Mechanical design of mobile robots. Selection of the mechanical configuration and design of braking, steering and traction systems. |
Other fields of research
> Robotics | > Vehicles > Thesis |



