ALACRANE (DPI2005-00207)
Asistente robótico móvil para misiones
de exploración y rescate


The major goal of the ALACRANE Project is to develop new methods and techniques for mobile robotic assistants in missions of exploration, search and rescue. Particularly, the robotic assistant consists on a mobile robot equipped with a light crane and a couple of 4 DOF manipulators. The assistant will be coordinated with another mobile robot with a trailer, so that objects can be loaded and unloaded. The robot team will be lead by a human agent.
The project objectives comprise the construction of the manipulators, the development of robotic architectures for the assistants (ALACRANE Architecture) and the robot team (CROMAT-IIMa), as well as realistic experimentation with the system. Furthermore, mobile robots Auriga-I and Auriga-II, previously designed by the Research Group, will be reconfigured so as to become part of the robot team with the new multi-manipulator platform.
Referencia: 2005-00207
Título del Proyecto: ASISTENTE ROBÓTICO MÓVIL PARA MISIONES DE EXPLORACIÓN Y RESCATE
Investigador Principal : GARCÍA CEREZO, ALFONSO gcerezo@ctima.uma.es
Centro: DPTO. INGENIERÍA DE SISTEMAS Y AUTOMÁTICA. UNIVERSIDAD DE MÁLAGA
THE MECHATRONIC SYSTEM OF ALACRANE
A) Mechanical Design
The ALACRANE robot is depicted in Fig. 1. This is a fully hydraulic robot that has been developed from a modified small demolition machine by Brokk®. Originally, this is an open-loop remote-controlled device. The vehicle has two motorized outriggers to provide stability when lifting or manipulating weights.
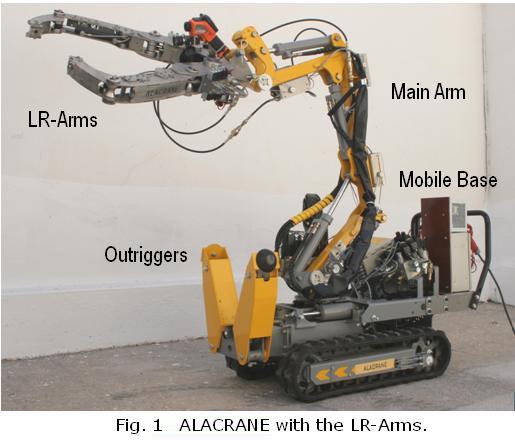
The robot consists of three main parts: the mobile base, the main arm, and the LR-Arms dual manipulator.
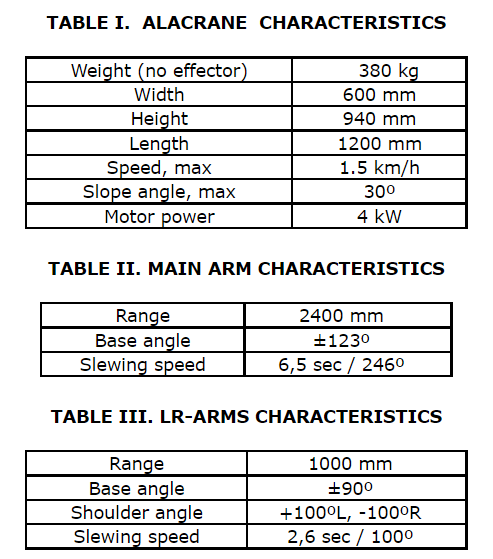
1) The Mobile Base: Its goal of the mobile base is to provide traction on rough terrain, such as rubble and moderate slopes. Tracked skid-steer traction is controlled by the speeds of two independent hydraulic motors (VL and VR) with encoders for dead-reckoning. The rubber belts are 130mm wide, with a longitudinal contact surface of 735mm and a distance between belt centerlines of 470mm. The performances of the robot base are related in Table 1. A power cable socket provides tethered three-phase AC power supply. Besides, for greater autonomy, a petrol-fed generator can be carried on a passive trailer towed by the mobile platform with a king-pin hitch.
2) The Main Arm: It has 5 DOF with 5 hydraulic cylinders. This redundant configuration increases its reachability of the end-effector. Characteristics of the main arm are summarized in Table II. Its payload is 120kg when it is fully extended, and 450kg in the vicinity of the arm base. These load capabilities require the outriggered vehicle.
3) The LR-Arms: A specific hydraulic end-effector that reproduces some human handling capabilities has been fully developed for ALACRANE. It consists on a dual manipulator configured as left and right Arms (LR-Arms). Its characteristics are summarized in Table III. It has 7 DOF: it adds an additional DOF to the main arm (q6), and 3 DOF for each manipulator (qL7 to qL9 and qR7 to qR9, for the left and right arms, respectively) as shown in Fig. 2. A force/torque sensor is included in the LR-Arms common base, and two 6 DOF force sensors. Both arms can be equipped with different end effectors. Besides, the stainless steel manipulator has been designed so that it can also be used as a large scale two-finger hand to grip greater size objects. Moreover, the LR-Arms tool is removable so that other standard tools can be connected to the main arm (e.g., on-off grippers, buckets or clamshell buckets, and grapples with an additional DOF).
B) Electronic System
The ALACRANE Electronic System is based on 3 onboard PC computers connected by Ethernet and a remote base. The low level control is assigned to a PXI PC computer (PC1). The 12 joint absolute encoders as well as the control valves for the hydraulic actuators are connected to PC1 through a CANopen bus. An Inertial Measurement Unit and a differential GPS system are also read by PC1. This low level control also supports the manual control joystick for the mobile platform and arms, and some low level functions of the navigation controller.
The other PCs (PC2 and PC3) are Compact PCs based on an Intel Core Duo microprocessor. PC2 supports the functional architecture of ALACRANE and the communication level with the Remote base. PC3 supports the high level perception system: A 2D Scanner Laser –with an additional DOF–, and two sets of video cameras.
C) Perception
The Mobile Base and the optional generator trailer are equipped with CCD cameras for navigation. The one on the base is coupled to a 3D laser scanner. Another set is mounted on the common axis of the LR-Arms. It consists of a thermal and a CCD camera, whose images are fused for target detection and teleoperation.
The 3D scanner device has been constructed by adding an extra degree of freedom to a commercial 2D SICK-LMS 291 time-of-flight range finder. Maximum specification values for this sensor are: field of view 180º, horizontal angular resolution 0.5º, and up to 80m range, ±4cm range error, 26 ms of scan time.
The 2D sensor has been mounted into a mechanical articulation so that 3D readings are provided directly in spherical coordinates. It incorporates a special counterweight to reduce the required driving torque. The vertical angular resolution is 1/3º with 60º of field of view. A complete scan with 361 x 181 point is obtained in an interval of 12 sec. The 2D rangefinder is continually sending range data with a refresh rate faster than drive control. Synchronization is achieved by waiting for the step acknowledgement from drive controller. At that time, the next complete 2D scan is recorded through the serial interface and, then, a new motion pulse is issued.
PUBLICATIONS
Books
J.M. Gómez de Gabriel, A. Ollero Baturone, A. García-Cerezo. “Teleoperación y Telerrobótica”. Pearson-Prentice Hall. ISBN: 84-8322-296-5 (2006)
Journals
Jesús Morales, Jorge L. Martínez, Anthony Mandow, Alfonso J. García-Cerezo and Salvador Pedraza. “Power Consumption Modeling of Skid-Steer Tracked Mobile Robots”. IEEE Transactions on Robotics, (2008) (En revisión)
J.L. Martínez, J. Morales, A. Mandow and A. García-Cerezo. “Steering Limitations for a Vehicle Pulling Passive Trailers”. IEEE Transactions on Control Systems Technology Vol 12, (2008 IEEExpress)
Antidio Viguria, Ivan Maza, Anibal Ollero and Alfonso J. Garcia-Cerezo. ”Distributed service based cooperation in aerial and ground robot teams for fire detection and extinguishing missions”. Journal of Field Robotics. (2007) (En revisión)
Jorge L. Martínez, Javier González, Jesús Morales, Anthony Mandow and Alfonso García-Cerezo.. “Mobile Robot Motion Estimation by 2D Scan Matching with Genetic and Iterative Closest Point Algorithms GA-ICP Laser Point Matching for 2D Mobile Robot Motion Estimation”. Journal of Field Robotics., 23(1), pp 21–34 (2006)
J.L. Martínez, A. Mandow, J. Morales, S. Pedraza and A. Garcia-Cerezo. “Kinematics for Tracked Mobile Robots”. The International Journal of Robotics Research. Vol 24, No. 10, October 2005, pp. 867-878. ISNN: 0278-3649
A.Mandow, J. L. Martinez, A. J. Reina, J. Morales. “Spherical Laser range Data Subsampling for 3D Scene Registration. IEEE Trans. Pattern Analysis & Machine Intelligence. (A enviar para su publicación).
Procedings
J.L. Martínez, J. Morales, A. Mandow, J. Serón and A. García-Cerezo “3D Navigation of ALACRANE mobile manipulator.” IEEE/RSJ IROS 2008, Niza, France. (2008) (En revisión)
Jorge Luis Martinez Rodriguez ; Antonio Jesus Reina Terol ; Antonio Mandow Andaluz . “Spherical Laser Point Sampling With Application To 3d Scene Genetic Registration” Proc. 2007 IEEE International Conference On Robotics And Automation. Roma, Italy (2007)
Alfonso Jose Garcia Cerezo; A. Mandow, J. L. Martínez, J. Gómez-de-Gabriel, J. Morales, A. Cruz, A. Reina, and J. Serón. ”Development Of Alacrane: A Mobile Robotic Assistance For Exploration And Rescue Missions” . Proceedings of the IEEE International Workshop On Safety, Security And Rescue Robotics. Roma, Italy (2007)
Antonio Mandow Andaluz ; Jorge Luis Martinez Rodriguez ; Jesús Morales Rodriguez ; José Luis Blanco Claraco ; Alfonso Jose Garcia Cerezo ; Antonio Javier Gonzalez Jimenez ;”Experimental Kinematics For Wheeled Skid-Steer Mobile Robots”. 2007 IEEE International Conference On Intelligent Robots And Systems IROS’2007, San Diego, California (Usa) (2007)
Jesús Morales Rodríguez, Jorge Luis Martinez Rodríguez, Antonio Mandow Andaluz, Alfonso José Garcia Cerezo, Jesús Manuel Gómez De Gabriel, Salvador Pedraza Moreno. “Power Analysis For A Skid-Steered Tracked Mobile Robot. IEEE International Conference On Mechatronics ICM2006. Budapest, Hungary , 2006
Jorge Luis Martinez Rodriguez ; Alejandro Pequeño Boter ; Antonio Mandow Andaluz ; Alfonso Jose Garcia Cerezo ; Jesús Morales Rodríguez. “Progress In Mini-Helicopter Tracking With A 3d Laser Range-Finder”. 16th World Congress, Praga, República Checa (2005)
Jesús Fernández Lozano; Alfonso Jose Garcia Cerezo; Javier Espinosa Duarte. “ Interfaces Persona-Máquina Multifuncionales De Alta Portabilidad”. Actas Del I Simposio En Ingeniería De Sistemas Y Automática En Bioingeniería: Sisab 2005, ISBN: 84-9732-452-8, Granada, España (2005)
Jose Ruiz Gomez; Gonzalo Ramos Jimenez; José Del Campo Ávila; Alfonso Jose Garcia-Cerezo; Rafael Morales Bueno. “Modelado De Un Robot Móvil Basado En Aprendizaje Inductivo”. Vi Jornadas De Transferencia Tecnológica De Inteligencia Artificial ISBN 84-9732-435-8, Granada, España (2005)
Patents
Alfonso José García Cerezo, Jorge Luis Martínez Rodríguez, Jesús Morales Rodríguez, Anthony Mandow Andaluz, Jesús Manuel Gómez de Gabriel, Alejandro Pequeño Boter, Juan Jesús Fernández Lozano. “Sistema robótico con capacidad todo-terreno y plataforma giro-estabilizada para colaboración con vehículos aéreos no tripulados”. Application Number: P200703291/0. España. Presentation Date: 13.12.2007. TITULAR: Universidad de Málaga.
Alfonso José García Cerezo, Jorge Luis Martínez Rodríguez, Jesús Morales Rodríguez, Anthony Mandow Andaluz, Jesús Manuel Gómez de Gabriel, Javier Serón Barba, Antonio Reina Terol, Alejandro Pequeño Boter, Juan Jesús Fernández Lozano, Víctor Muñoz Martínez. “Sistema robótico con capacidad todo-terreno y brazo manipulador múltiple, y elementos de control y sensoriales separables y al mismo tiempo funcionales”. Application Number:: P200703290/2 España. Presentation Date: 13.12.2007. TITULAR: Universidad de Málaga.
PhD. Thesis
Jesús Morales Rodríguez. “Control de un Robot Móvil de Cadenas con Múltiples Remolques e Integración en un Sistema Multirrobot”. Directors: Alfonso García Cerezo and Jorge L. Martínez. University Málaga (2007)
MSc. Thesis and Internal Reports
Gaspar Gil Gómez, Alfonso García Cerezo, Andre Schiele, Gianfranco Visentin, Hanspeter Lutz, “Man-Machine interface development for robot teleoperation by using an Exoesqueleton”. ESA Internal Report, June, (2006).
J. Pablo Viedma Rivera. “Desarrollo de una aplicación para el control borroso basada en el entorno Easy Java Simulations”. ISA-UMA MSc. Thesis. Supervisor: A.García Cerezo. Julio, (2007).
Alberto Plaza Perez,. “Diseño e implantación de una Librería de Lógica Borrosa”. ISA-UMA MSc. Thesis. Supervisor: A. García Cerezo. Nov, (2007).
Francisco Sánchez Espejo, “Aplicación de Técnicas de control visual a un robot móvil SR1 mediante cámara fija”. ISA-UMA MSc. Thesis. Supervisors: Antonio Reina, Anthony Mandow. Abril, (2007).
Gonzalo Gálvez Soler, “Simulador para vehículos autónomos aéreos y terrestres“ ISA-UMA MSc. Thesis. Supervisor: A. García Cerezo. (2007).
Michael Bauer “Application of Fuzzy Navigation control for the SR1 Mobile Robot” TU-Dresden MSc. Thesis. Supervisors: Prof. Dr. techn. K. Janschek (TUD). Prof. Dr. Ing. Alfonso J. Garcia-Cerezo (UMA), Dr. Anthony Mandow (UMA). (December, 2007). Dresden (Germany)
DOCUMENTACIÓN ADICIONAL
Para ver el resto de la información, pinche aquí.



