Proyectos
 |
The mission of the SAR4.0 project is to develop new collaborative SAR support technology where heterogeneous robotic teams, sensor networks, communication systems and deployed artificial intelligence (AI) produce seamless, transparent, fluid, and adaptive support to the responders with the ultimate goals of optimizing SAR efficiency and minimizing mission-associated risks. ... read more |
 |
The goal of the TRUST-BOT project is to develop important resiliency and fault-tolerance characteristics that are necessary to achieve a heterogeneous team of mobile robotic manipulators, with both unmanned ground vehicles (UGV) and unmanned aerial vehicles (UAV), cooperating in harsh disaster scenarios in order to be able to dependably accomplish their specified search and rescue missions. ... read more |
 |
DPI2015-65186-R FIRST-ROB: MULTI-ROBOT SYSTEM FOR COOPERATION WITH FIRST RESPONSE HUMAN AND CANINE RESCUE TEAMS IN DISASTER SCENARIOS The major motivation of Rescue Robotics is saving human lives. However, in spite of the growing interest in this application, the adoption of rescue robots is still scarce. In order to fulfill its enormous potential benefits for society, the development of this novel technology not only has to improve the reliability of existing systems in the hard conditions of disaster scenarios, but also has to target the actual needs and protocols ... read more |
 |
CICYT DPI2011-22443 RAMBLER: TOWARDS LONG-RANGE EXPLORATION ROBOT AUTONOMY IN NATURAL ENVIRONMENTS In long-range exploration missions, robots must deal with different tasks, such as building maps of their environment, determining their absolute and relative location, path planning, and obstacle avoidance. Moreover, to successfully fulfill these missions in natural terrains, robots require a significant increase in their cognitive abilities for detection, modeling, or classification of objects …read more |
 |
CICYT DPI2008-00553 3D MANEUVERING STRATEGIES FOR A TELE-AUTONOMOUS SEARCH AND RESCUE MOBILE ROBOT OPERATING IN NATURAL AND DISASTER SCENARIOS (REMOTE). The primary objective of this project is to develop new methods and techniques for the exploration of natural areas and environments affected by disasters, and to support the search and rescue of hazardous objects and victims. The mobile manipulator to be used in this project is based on ALACRANE-I, …read more |
 |
P10-TEP-6101-R NAVEGACIÓN AUTÓNOMA DE UN ROBOT MÓVIL 4X4 EN ENTORNOS NATURALES MEDIANTE GPS DIFERENCIAL Y TELÉMETRO LÁSER TRIDIMENSIONAL. Autonomous navigation of mobile robots in natural environments is much more complex than in an artificial one, since the latter is already prepared for the movement of people or vehicles. This research project seeks to achieve autonomous navigation of a small 4x4 mobile robot in natural terrains at low speed. For this purpose, the vehicle employs odometry, gyroscopes, inclinometers, GPS and a 3D laser rangefinder. …read more |
 |
VICTORIA (VEHICLE INITIATIVE CONSORTIUM FOR TRANSPORT OPERATION AND ROAD INDUCTIVE APPLICATIONS). This project in the framework of 2013 FEDER-INTERCONECTA is focused on the design and development of sustainable urban public transport systems. The Victoria project is the starting point of a wireless en-route charging for electric buses for Malaga. This improves substantially the vehicle’s profitability and efficiency as it aims at doubling the range of electric buses without affecting operating times. The project is led by ENDESA and is participated by 10 enterprises and public research institutions (IPO) Our group participates as an OPI with CONACOM and EMT. ... read more |
 |
ATICA (ALL TERRAIN INTELLIGENT COMPACT & AUTONOMOUS VEHICLE) This project in the framework of FEDER-INNTERCONECTA (CDTI), has been funded by the Iturri Group. The major goal is the design and development of a logistics vehicle with autonomous navigation capabilities and all-terrainh mobility. The vehicle can be guided as a standard logistics vechicle, and also in autonomous mode, both as a single vehicle or as part of a convoy. |
|
HY88: 8X8 VEHICLE WITH ELECTRIC-HYBRID PROPULSION The project is led by Iturri Group. The goal is to design a 20 tons eight-wheel vehicle with hybrid propulsion. The project was funded by the Programa de Fondos Tecnológicos - Proyectos Integrados (CDTI) with FEDER support. |
|
FP7-INFRASTRUCTURES-2011-2. GA: 283783 GLOBAL ROBOTIC TELESCOPES INTELLIGENT ARRAY FOR E-SCIENCE. GLORIA significa “GLObal Robotic-telescopes Intelligent Array”. GLORIA es la primera red de telecopios robóticos del mundo de acceso libre. Es un entorno Web 2.0 donde los usuarios pueden hacer la investigación en la astronomía mediante la observación con telescopios robóticos, y/o análisis de los datos que otros usuarios han adquirido con GLORIA, o desde otras bases de datos de libre acceso …seguir leyendo |
|
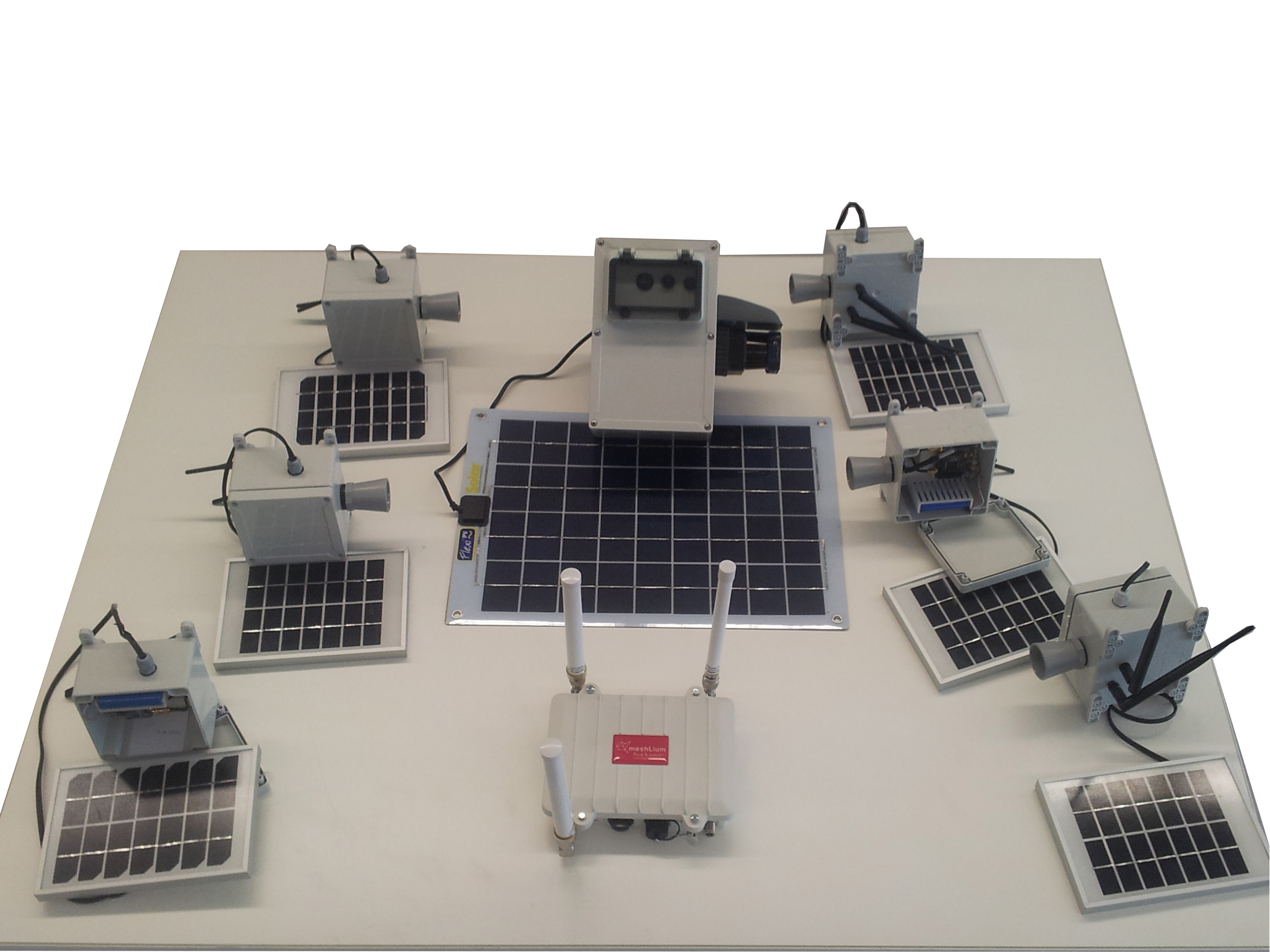 |
G-GI3000/IDIZ SISTEMA MÓVIL DE INFORMACIÓN APLICADO A LA MOVILIDAD URBANA. Our Research Group is involved in the design, development and implementation of a wireless smart sensors to acquire information about traffic and the environment, as well as to communicate with each other and with the outside, resulting in traffic reports available by the user in real time. …seguir leyendo |
 |
S.T.24.1.6 POWER E-MOBILITY ACCELERATOR El proyecto E-Mobility Accelerator busca facilitar la implantación de vehículos eléctricos en Europa. Está integrado dentro de un programa de proyectos superior denominado Power Pogramme, que pertenece a una iniciativa comunitaria del Fondo Europeo de Desarrollo Regional en favor de la cooperación entre regiones de la Unión Europea, denominada INTERREG IVC. El objetivo global del programa Power es el desarrollo de economías regionales basadas en la reducción de las emisiones de dióxido de carbono. |
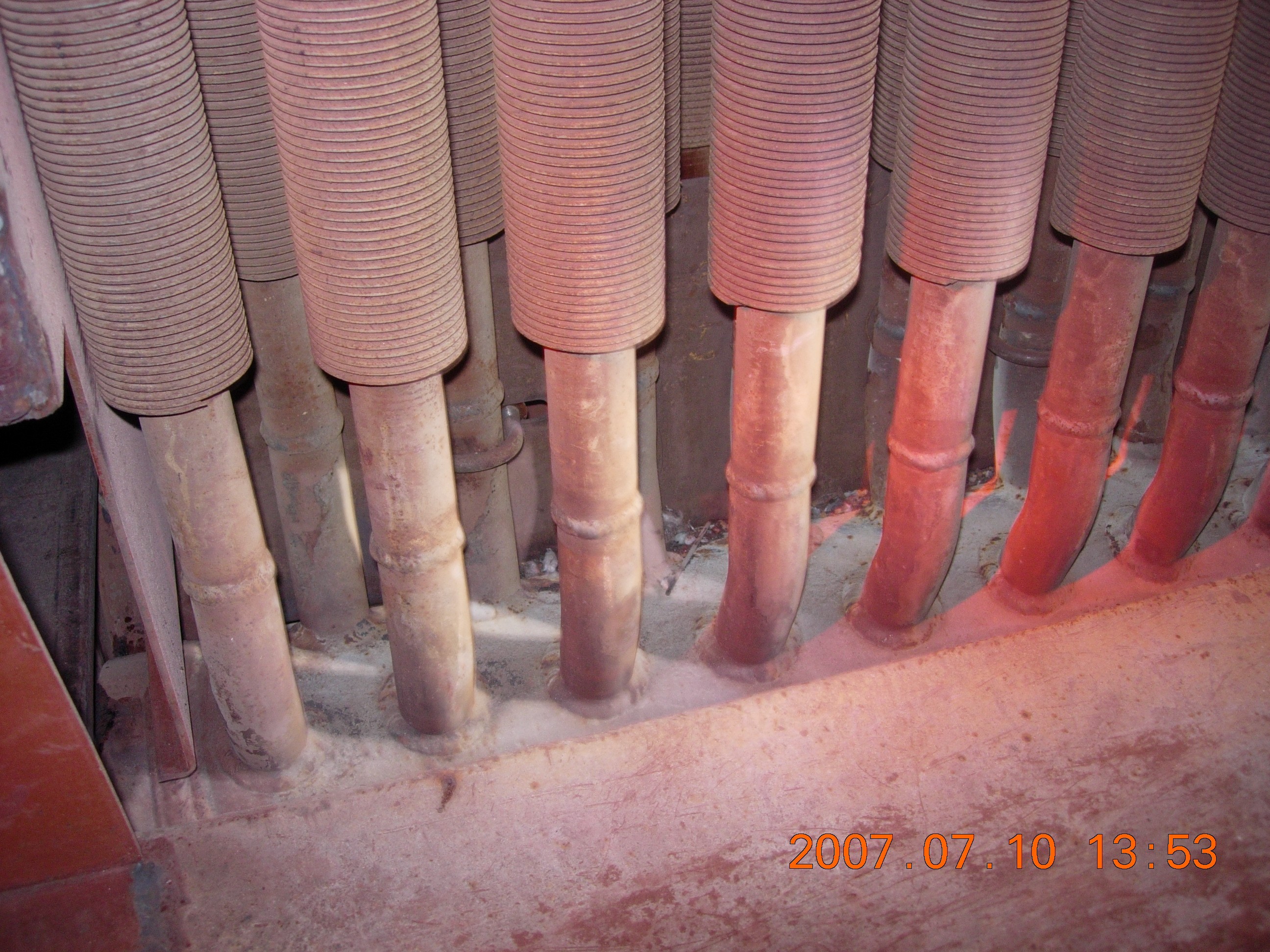 |
PROYECTO INSROCA: DISEÑO Y DESARROLLO DE UN ROBOT PARA INSPECCIÓN DE ELEMENTOS A PRESIÓN DE CALDERAS DE RECUPERACIÓN EN CENTRALES ENERGÉTICAS El proyecto está financiado por el CDTI e IBERDROLA SLU. A partir de los resultados del proyecto ROBOCA, se desarrolla un sistema de visión con periscospio abatible, y se optimiza el sistema de refrigeración para trabajos en caldera. Asimismo se introduce un sistema para posicionamiento de la cápsula, que permite la localización exacta dentro de la zona de trabajo. |
|
PROYECTO ROBOCA: INVESTIGACIÓN SOBRE SISTEMAS DE INSPECCIÓN ROBOTIZADOS PARA DETECCIÓN DE FUGAS EN CALDERAS DE RECUPERACIÓN DE CICLOS COMBINADOS El proyecto está financiado por CTA e IBERDROLA SLU. El objeto del proyecto es identificar las grietas y poros que pueden aparecer en las soldaduras entre colectores y tubos aleteados de las calderas de recuperación de energía. Para la inspección de estas zonas, se ha desarrollado un sistema de visión que envía las imágenes capturadas al exterior de la caldera para ser analizadas. Este sistema de visión se introduce dentro de la caldera mediante el uso de una pértiga desmontable. |
 |
P06-TEP-01379 TELEOPERACIÓN DE MANIPULADORES MÓVILES DOTADOS DE SENSORES TÁCTILES EN ESCENARIOS DE CRISIS (TELSTAR). Se aborda el problema de la manipulación tactil con manipuladores móviles en aplicaciones de rescate. A partir de la construcción de una matriz de sensores táctiles, se ensayan distintas técnicas para la estimación / obtención del mapa de presiones del sensor, y la reprogramación del robot para generación de movimientos seguros en manipulación de victimas, o de elementos sensibles. |
 |
CICYT DPI2005-00207 ASISTENTE ROBÓTICO MÓVIL PARA MISIONES DE EXPLORACIÓN Y RESCATE. The major goal of the ALACRANE Project is to develop new methods and techniques for mobile robotic assistants in missions of exploration, search and rescue. Particularly, the robotic assistant consists on a mobile robot equipped with an 4 DOF hidraulic manipulator and a couple of 4 DOF aditional manipulators. The assistant will be coordinated with another mobile robot with a trailer, so that objects can be loaded and unloaded. …seguir leyendo |
 |
SEAMAR - SOLUCIONES EÓLICAS ANDALUZAS PARA EL MAR. SEAMAR es un proyecto del programa FEDER INNTERCONECTA de la convocatoria 2012, y está, liderado por NAVANTIA.. El grupo colabora con ENEROCEAN en el análisis tecnológico del sistema de monitorización adaptado a las condiciones offshore, incluyendo el análisis predictivo para el mantenimiento de la estructura. El objetivo principal del presente proyecto es desarrollar tecnologías avanzadas de estructuras soporte de aerogeneradores de eólica marina orientadas a la fabricación en serie …seguir leyendo |
EUROSTARS Q-SAIL PROJECTProyecto EUREKA financiado en la convocatoria Eurostars en colaboración con ENEROCEAN. Se ha participado en la certificación de la tecnología basada en velas para la extracción de la energía de las corrientes de marea, realizando el análisis del recurso marino, desde el punto de vista de la energía de las corrientes.…seguir leyendo |
|
 |
CICYT DPI2002-04401-C03-01 Proyecto CROMAT. TELEOPERACIÓN Y CONTROL COORDINADO DE SISTEMAS MULTIRROBOT. CROMAT PROJECT: The main objective of the CROMAT project is the development of new methods and techniques for the cooperation of aerial and ground mobile robots. It is intended to develop technologies that could be used in applications such as inspection of utilities, infrastructure and large buildings, disaster detection and monitoring (fires, floods, volcano eruptions, earthquakes), exploration, surveillance, urban safety, humanitarian demining. …seguir leyendo |
 |
EXC/2005/TEP-375 SISTEMAS AUTÓNOMOS Y DISTRIBUIDOS PARA LA CONSERVACIÓN DEL MEDIO NATURAL Desarrollo de soluciones para la monitorización de entornos naturales, y fauna protegida mediante robots aéreos y terrestres dotados de redes de sensores inalámbricas. Coordinado por el grupo de robotica y visión (GRV) de la universidad de Sevilla, participaron más de 20 doctores de la Univerisdad de Sevilla, la Universidad de Málaga, y científicos de la estación biológica de Doñana (CSIC). |
 |
GONIOFOTÓMETRO La certificación de luminarias exige el uso de un goniofotómetro. Hasta el momento, la certificación de luminarias se realiza en instalaciones cuyo funcionamiento es en gran medida manual, lo que supone que se tengan inexactitudes en las medidas y un tiempo de caracterización elevado. En el Instituto se ha desarrollado (concepción, fabricación y puesta en marcha) un goniofotometro para la caracterización automática de luminarias, con una precisión en las medidas 10 veces mayor, tiempo de caracterización 4 veces inferior y dimensiones muy reducidas frente a otras soluciones industriales.
|
|
|



